旋转导向钻井稳定平台前馈模糊算法研究

被誉为“钻井导弹与制导技术”的旋转导向钻井是一项涉及多学科的高新科技尖端技术。它具有机械钻速和井身轨迹控制精度高、位移延伸能力强等特点,且可以有效地克服滑动导向工具给系统带来的摩擦阻力过大和井眼清清等问题,其中稳定平台的控制是旋转导向钻井系统的关键。虽然传统的PID控制对固定输入已有很好的控制效果,但钻井过程中的钻井液脉冲压力不可能保持固定值,由此会带来过程对象模型的某些不确定性。因此,设计中充分考虑到系统的鲁棒性和自适应性需在控制中加入智能控制以保证系统的性能指标。根据工程上对稳定平台的要求,这里提出了采用前馈模糊控制算法控制稳定平台系统的设计方案,试验结果表明该控制方法抗干扰能力强、鲁棒性好。
2 稳定平台前馈模糊控制系统原理
旋转导向钻井工具的稳定平台是整个导向工具中的关键。稳定平台可以不受钻杆旋转的影响而相对稳定于一个给定角度,从而使旋转导向系统能够在钻柱、工具和导向块旋转时,钻井工具稳定跟踪预置的钻井轨迹,实现斜井和水平井的钻采目。旋转导向钻井稳定平台前馈控制的原理图如图l所示。
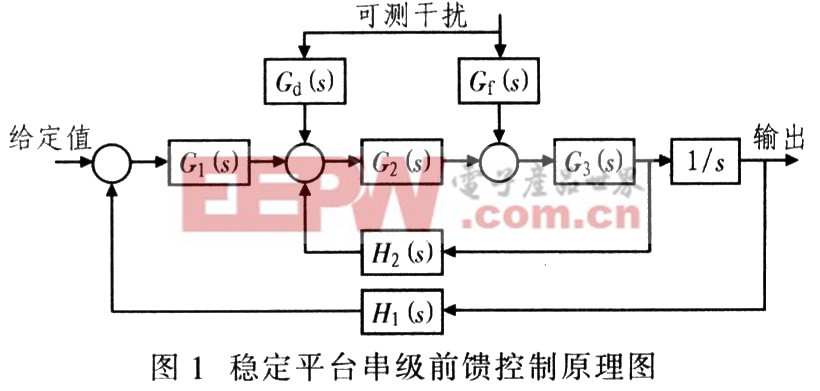
图1中,G1(s)为模糊控制器;G2(s)为PID控制;G3(s)为下发电机的传递甬数;Gd(s)和Gf(s)为系统引入的前馈环节,其中:Gd(s)为前馈调节器函数,Gf(s)为干扰通道的传递函数;H1(s)为位置反馈通道传递函数;H2(s)为速度反馈通道传递函数。这样既能保证平台随动的精度,又能使稳定平台有较强的自适应性。
3 模糊控制器的设计
3.1 模糊控制器的基本结构
由于钻井工程中存在大量井下参数以及其严重的复杂性和不确定性,欲提高旋转导向钻井稳定平台系统的控制功能,需引入模糊控制器。根据旋转导向钻井稳定平台控制系统对精度和实时性要求,该设计采用双输入单输出的二维模糊控制器。模糊控制器的结构原理如图2所示。该控制器是一个两输入、单输出的模糊控制器,其中E和Ec为模糊控制器输入,u为模糊控制器输出,通过模糊控制规则控制u,以满足不同时刻E和Ec的要求。

3.2 模糊控制器控制规则
取偏差角α为偏差E,转速ω为偏差变化Ec,取扭矩发生器驱动电压信号为输出u。根据不同的α及ω系统控制u。在导向钻井工具运行时,系统的转速ω和偏差角α输入数据分别为测量系统的角速度和角位置信号。偏差角的值为操作命令指定所给定的角位置和姿态测量传感器的实际角位置之差。因此,模糊控制器控制规则如下:
(1)当转速较大时,只做降速控制,不考虑实时角位置的测量值。因为即使是偏差角等于零时,只要转速不等于零,系统的动态过程就未结束。
(2)当转速为零时,系统只按偏差角调整。使对象根据α从规定方向趋近给定角。
(3)当转速较小时,需根据ω、α综合考虑控制输出的变化。需要注意这两个量之间的符号关系,即就是:ω和α同号时,旋转运动正在使偏差角增加,控制量输出应与输入反号且尽可能取较大值。使对象尽快在该转向半周内使ω为零甚至反向;若ω和α反号,说明现在偏差角减少,可以利用小转速转动,提高对象响应时间来减少降速。降速的减少可根据系统的多个动态指标综合调整。随着α的减少,可适当增加一些减速作用以减少超调角度。
系统工作时,系统将根据输入的α和ω来查询模糊控制规则表,从而自动决定输出u的大小。
3.3 基于模糊控制器的设计
设计ω,α和u的论域界定为7个等级。语言模糊集取NL,NM,NS,ZE,PS,PM,PL,含义分别为:负大、负中、负小、零、正小、正中、正大。3个量均选用三角形隶属度函数,且均采用线性划分,其中ω的实际论域为±120 r/m,α的实际论域为±180°,u的实际论域需根据系统响应的灵敏度和稳定性等指标综合调整确定。控制器模拟推理采用较简单的Mandani算法。
4 系统仿真实验
该系统设计的控制对象为下发电机,其传递函数为G(s)=Km/(Tms+1),其中Km是广义对象总的放大系数,等效时间常数Tm主要取决于平台本身转动的摩擦系数和转动惯量等机械参数。Km=1/f,Tm=J/f,其中f为平台转动摩擦系数,J为平台转动惯量。
在系统设计中,取J=0.01l kg・m2,取钢对钢的动摩擦系数f=0.15。可得到Km=6.67,Tm=0.073。即传递函数为:
G(s)=6.67/(0.073 s+1) (1)
图3为前馈模糊控制系统仿真框图。


评论