基于pro/e的中小型排水管道清淤机器人虚拟样机设计

随着国民经济的迅速发展,环境污染日益严重,环保问题越来越受到社会各界的普遍关注。城市污水排放是确保环境卫生、建设现代化文明城市的重要一环。目前,我国绝大多数城市排水管道的清淤工作仍普遍处于人工作业的落后状况,不仅体力繁重、效率低,而且井下工作环境恶劣,易于引发爆炸等事故伤害。文献检索的结果表明,国内外管道机器人多用于核反应堆管道和油气输送管道的检测、补口等工作,而排水管道清淤机器人的研究尚属空白。鉴于这种情况,我们进行了排水管道清淤机器人的研究,并在Pro/Engineer平台上进行了清淤机器人虚拟样机设计。
本文引用地址:https://www.eepw.com.cn/article/163330.htm一、排水管道清淤机器人设计方案
排水管道清淤机器人本体采用四轮结构,轮子用耐磨、耐腐蚀的合成橡胶制成,并在其表面加设花纹以增大摩擦力。车轮与管道壁接触处的形状与管壁的弧形完全一致,以尽量做到无间隙接触。车体前部装有作业刀具,用于清理管道中的树枝及钙化物等淤积物。清理后的淤积物在水流的冲刷下被带到下游管道检查井。
虚拟样机(Virtual Prototyping) 是当前设计制造领域的一门新兴技术,该技术是在计算机上通过CAD/ CAM/ CAE等技术将产品信息集成到计算机提供的可视化虚拟环境,在实际产品制造之前实现产品的仿真、分析与优化过程。
2.1 管道清淤机器人虚拟样机的系统结构
管道清淤机器人虚拟样机将管道清淤机器人研究与虚拟样机技术相结合, 针对机器人设计与制造过中的运动学与动力学分析、轨迹和路径规划、机器人与工作环境的相互作用等技术内容进行研究与系统开发,通过系统仿真软件在相应虚拟环境中真实地模拟系统的运动,在计算机上方便地修改设计缺陷,仿真不同的设计方案,对系统进行不断的改进,直至获得最优的设计方案以后,再做出物理样机。
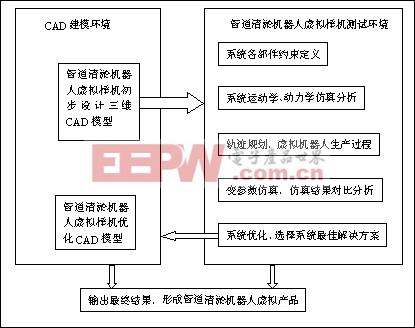
图1 管道清淤机器人虚拟样机系统结构图
2.2 利用Pro/e实现管道清淤机器人虚拟样机设计
Pro/Engineer的主要功能是进行参数化的零件造型设计,所提供的功能包括实体造型设计、曲面设计、建立工程图、零件组合、简单的有限元素分析、模具设计、电路设计、装配零件设计、加工制造、逆向工程等。
本文以锥齿轮为例详细介绍pro/e的参数化设计过程。设计步骤如下。
1. 新建零件文件
(1)新建零件文件:“bevelgear”。
(2)取消选中【使用缺省模板】复选项,选用【mmns-part-solid】。








评论