基于pro/e的中小型排水管道清淤机器人虚拟样机设计
8. 镜像渐开线
(1)创建过曲线8和曲线9的交点的基准点PNT3。
(2)创建通过基准点PNT1,且垂直与基准平面DTM2的基准轴A-2。
(3)创建通过基准轴A-2和基准点PNT3的基准平面DTM4。
(4)创建与DTM4的偏移角度为-3且通过A-2的基准平面DTM5。
(5)将基准平面DTM4与DRM5的夹角参数添加到【关系】对话框中,然后输入关系式:“=360*COS(DELTA)/(4*Z)”。
(6)选择DTM5作为镜像平面镜像齿轮大端渐开线。
(7)使用同样的方法镜像小端渐开线。
9. 创建第一个轮齿
(1)在主菜单中选择【插入】-【扫描混合】-【伸出项】选项,打开【菜单管理器】,在【混合选项】菜单中选取【草绘截面】、【垂直于原始轨迹】和【完成】选项。在【扫描轨迹】菜单中选择【草绘轨迹】选项。选取基准平面FRONT作为草绘平面,然后使用缺省参数放置草绘平面。
(2)在右工具箱中单击【使用边】按钮,打开【类型】对话框,选择其中的【单个】单选按钮,使用修剪按钮结合绘图工具绘制扫描轨迹线。
(3)根据系统提示,在消息输入窗口中输入z-axis旋转角度:“0”。
(4)在右工具箱中单击【使用边】按钮,打开【类型】对话框,选择其中的【单个】单选按钮,使用修剪和倒圆角按钮并结合绘图工具绘制齿轮的大端齿廓线。(注意在两个圆角处添加等半径约束)。
(5)根据系统提示,在消息输入窗口中输入z-axis旋转角度:“0”。
(6)使用类似的方法绘制小端齿廓线,最后生成轮齿结构。
(7)打开关系对话框,在对话框中添加以下关系式:
If hax1 d207=0.31*m d217=0.31*m endif if hax>=1 d207=0.2*m d217=0.2*m endif
其中,d207和d217分别是齿轮大小端的齿廓曲线的倒角。
10. 复制和阵列轮齿
(1)使用旋转复制的方法复制前一步骤创建的轮齿,旋转角度为“360/z”,最后生成第二个轮齿。
(2)使用阵列方法阵列轮齿,阵列特征总数为24。
(3)将旋转复制轮齿时的旋转角度参数添加倒【关系】对话框中,然后输入关系式:“=360/z”。
(4)将第一个齿到第三个齿的距离参数添加到【关系】对话框中,然后输入关系式:“=z-1“。
11. 创建锥体
(1)在右工具箱中单击【旋转】按钮,打开设计图标板。选择基准平面FRONT作为草绘平面,接受系统缺省参数放置草绘平面,进入二维草绘模式。
(2)使用基本绘图工具绘制锥体的二维图形。最后生成锥齿结构。
(3)将锥齿大端长度参数添加到【关系】对话框中,然后输入关系式:“=0.8*h”。
12. 添加装饰结构
13. 改变齿轮参数
在主菜单中选择【工具】-【参数】选项,打开【参数】对话框。修改齿数为39,模数为2.5,齿宽为15。
修改后在主菜单中选择【编辑】-【再生】选项,按照修改后的参数再生模型。最后生成模型如图2所示。
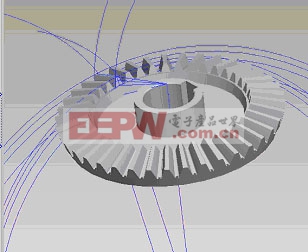
图2 圆锥齿轮
三、结论
利用虚拟样机技术实现中小型排水管道清淤机器人设计,可以在有条件制作物理样机之前对机器人的运动性能、机器人的可装配性、可制造性进行科学评价,从而优化了设计,压缩甚至取消了物理样机的试制过程,缩短了机器人开发周期,节省了设计费用,也为今后机器人的产业化提供了技术保障。









评论