光纤连接器研磨机伺服控制系统设计

光纤连接器是光纤通信网络中应用最广泛的光无源器件,其核心部件是光纤插针。光纤连接器制造过程中的一道重要工序就是利用光纤连接器研磨机对陶瓷插针端面进行研磨。为了使光纤插针端面与研磨砂轮按要求接触研磨。涉及到研磨机操作台X、Y、A 3个轴方向上的重复定位运动控制。伺服控制系统是光纤连接器研磨机的一个重要组成部分。
伺服电机能将输入的电信号转变成角位移或角速度输出,具有运行稳定、无自传和快速响应等特性,在伺服控制系统中作为执行元件。
ED200伺服放大器是一种智能化的伺服电机控制器,能提供速度、位置和力矩的全数字化控制。PLC的使用可以提高伺服控制系统的稳定性,增强系统的抗干扰能力:触摸屏的使用可以提供清晰的人机操作界面。
本设计的研磨机伺服控制系统由伺服电机、ED200伺服放大器、PLC和触摸屏4部分组成,将它们的优点结合起来,极大地提高了光纤连接器的研磨质量和成品率。
1 伺服系统的组成结构及工作原理
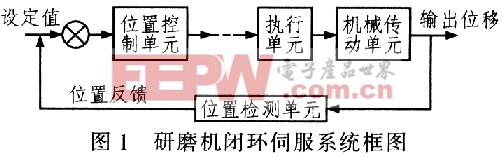
伺服系统是用来控制被控制对象的某种状态,使其能自动地、连续地、精确地复现输入信号变化规律的一种自动控制系统。由于光纤连接器插针的芯径很细,为了按照倒角要求研磨出较理想的端面,操作台X、Y、A 3个轴方向的重复定位误差必须控制在一定的范围内。ED200伺服放大器采用高响应矢量控制,具有高精度的电流检出能力,可以实现高精度、高速度和稳定进给,能很好满足系统的控制要求。光纤连接器研磨机伺服控制系统是一个闭环控制系统。图1是其闭环伺服系统框图,系统将输出位移与设定进行比较,自动对位置环参数、速度环参数、电流环参数以及励磁参数进行调整,使目标位置与实际位置趋于一致,从而达到精确定位的目的。
2 伺服系统设计
2.1 系统的硬件设计
本设计在硬件上选用Kinco公司的S23型两相伺服电机、ED200型伺服放大器以及三菱公司FX2N系列PLC和GOTl000触摸屏。
光纤连接器伺服控制系统硬件结构如图2所示。研磨过程中涉及到水平、垂直和旋转3种运动,分别由X、Y、A 3个轴的伺服电机和伺服放大器控制。3个轴的连接与控制方式类似,图中为PLC与一个轴的伺服放大器相连的情况。

ED200伺服放大器是一款智能型全数字伺服驱动器,驱动器内部集成了驱动、控制、总线、I/O等功能,内部可以存储256段程序,每段程序又都可以存储一种运动曲线,包含加速度、减速度、最大速度、目标位置等重要的运动曲线参数,通过8个I/O口,实现最多128种运动曲线直接调用。利用ED200提供的通讯功能,外部控制器PLC可以调用ED200内部存储的256段程序并通过触摸屏人机界面的数据输入窗口直接修改驱动器内部系统参数。
2.2 系统的软件设计
研磨机伺服系统的软件设计包括ED200内部对象(目标位置、速度、加速度、减速度、找原点方式以及工作模式等)赋值和PLC编程控制。
ECO2WIN是ED200伺服放大器专用编程软件,采用顺序编程(Sequencer Programming)的方法对放大器内部的对象赋值。由于研磨过程多次涉及到定位,因而工作模式选用位置控制模式(绝对/相对位置模式),该模式下要定义的对象如表l所示。
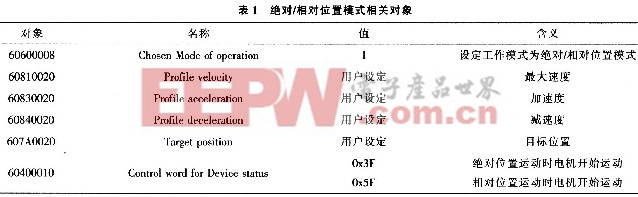
ED200伺服驱动器每段程序都有一个相应的程序段号,在其列表内最多包含8个具有读写(RW)属性的对象。调用一段程序后,该程序段内的所有指令会按照从上至下的顺序依次执行,这就是顺序编程思想。
















评论