一种双模糊控制器的设计实现

摘要:在工程实际中,很多被控对象具有时变、非线性的特点,用常规的控制方法难以进行控制或者控制效果不好,为了对这类实际系统进行有效地控制,本文基于模糊控制器的基础上,设计实现了一种双模糊控制器,根据实际系统输出信号的误差大小利用两个模糊控制器分别进行控制,以改善系统的快速性和消除误差。从仿真结果来看,和常规PID控制及普通模糊控制相比,双模糊控制器有效地减小了系统稳态误差,响应时间、超调量、稳定时间等性能均优于传统的PID控制和模糊控制。
关键词:双模糊控制器;时变;非线性;性能
传统的控制方法均建立在被控对象的精确数学模型之上,随着系统复杂程度的提高,建立系统的精确数学模型和满足实时控制要求将越来越难以实现。模糊控制是模拟人的思维方法,无需建立系统精确数学模型,在处理时变和非线性系统上取得了很好的应用效果。很多专家和学者应用模糊控制实现了复杂系统的设计和仿真,如曾鸣等人应用双模糊控制器用于车辆半主动悬架控制、周妮娜应用于模糊控制器实现对锅炉除氧系统,张松兰等人设计了锅炉汽包水位模糊自适应控制策略,冯冬青等设计了一类时变非线性系统的参数反馈模糊控制器等。
从设计仿真结果来看,使用单模糊控制器虽然在很多性能上超越了传统的PID控制,但是对于具体工业系统而言,系统的输出波形仍然存在着一定的偏差,系统的稳态误差问题始终没有得到很好的解决。本文试图设计一种新的双模糊控制器,解决系统输出的稳态误差问题。
1 双模糊控制器的设计
单模糊控制器主要用于快速响应及对大误差的消除,在单模糊控制器中,将其误差量化因子Ke增大,从而相当于缩小了误差的基本论域,增大了对误差变量的控制作用。同时,将误差变化率因子Kec增大,以减小超量。将控制量的比例因子Ku减小,以减小系统振荡。
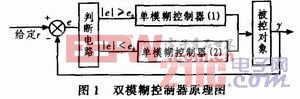
双模糊控制器原理图如图1所示。假设变量eo为大、小误差的临界值(人为可以根据实际设定),当系统误差较大时,用单模糊控制器1控制,以达到快速响应、消除误差的目的;当系统的误差较小时,用单模糊控制器2进行控制,从而改善模糊控制器对于系统误差较小时的控制效果,进而帮助取得较好的控制效果。
进行仿真时,给定输入信号为单位阶跃信号。控制对象为一典型时变对象,数学模型表示为:![]() ,其中,T1、T2为时间常数,分别为100 s和72 s,τ为系统滞后时间10 s,K为比例系数,值为2。该系统是一个大滞后系统,非线性特性,属于典型的工业控制对象。
,其中,T1、T2为时间常数,分别为100 s和72 s,τ为系统滞后时间10 s,K为比例系数,值为2。该系统是一个大滞后系统,非线性特性,属于典型的工业控制对象。
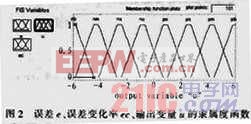
设计双模糊控制器时,将输入信号误差e量化为8个等级,{NB,NM,NS,NO,PO,PS,PM,PB},误差变化率ec和输出变量u量化为7个等级,{NB,NM,NS,ZO,PS,PM,PB},误差e及误差变化率ec、输出变量u论域为[-6,6]。误差e及误差变化率ec、输出变量u的隶属度函数选为梯形隶属度函数如图2所示。










评论