基于PID的单相逆变器复合控制方案设计

引言
本文引用地址:https://www.eepw.com.cn/article/161990.htmPID控制作为一种经典控制算法,具有结构简单、易于调试、动态响应特性快、鲁棒性强等特点。但是,对于中、低频周期信号,该算法仍无法实现无静差控制;对由非线性负载引起的输出波形畸变的调节能力也较差。
本文介绍了一种PID控制器与重复控制器采用串联拓扑结构的方案,将稳定的PID+控制对象闭环系统作为重复控制器的控制对象,在保证系统稳态误差和动态性能的同时,简化了重复控制器的设计。
1 逆变器模型
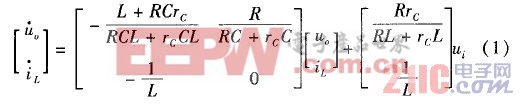
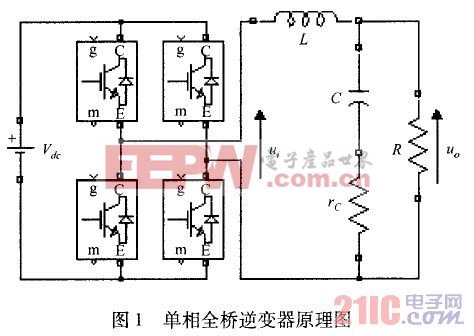
式中,u0为输出电压;i 为电感电流; 为负载电阻;C为滤波器电容;£为电容等效串联电阻:

取采样频率和开关频率相等,把逆变桥看作一个零阶保持器,将式(2)离散化可得对象的脉冲传递函数为:

2 PID控制器设计
图2所示为PID控制系统的开环频率特性图(Bode图)。其中,G0为被控对象;G 为PID控制器;G=Gp×G0
按照传统PID设计理论,首先设开环系数为K=200,目的是提高系统低频增益,减小稳态误差。但是K值过大会降低系统稳定性,所以在低频段 处加一零点,与积分环节构成滞后校正。该滞后环节的作用主要有两条:一是在保证系统暂态性能基本不变的情况下,提高系统低频响应的增益,减小系统的稳态误差;二是利用其低通滤波特性衰减系统高频响应增益,提高系统的相角裕度,以改善系统的稳定性。
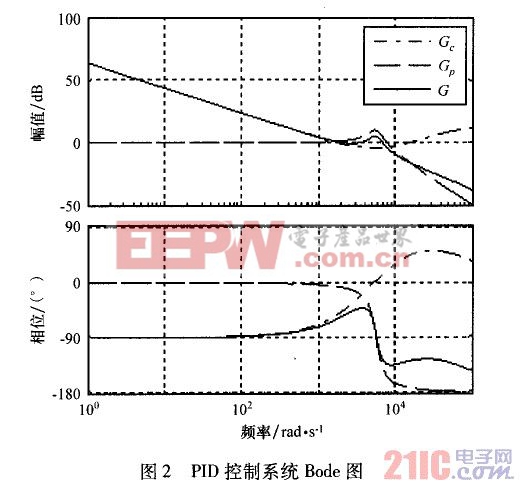
在中频段60 处加一零点,同时在高频段 处加一极点,由此构成超前校正。其作用主要有两条:一是利用相角超前特性增大系统的相角裕度,提高系统的截止频率,保证系统快速的动态响应;二是衰减系统高频响应增益,抑制高频噪声,提高系统鲁棒性。







评论