数控机床大推力永磁同步直线电机控制方法

摘要 以大推力直线电机及数控机床性能测试为背景,对双边型大推力永磁同步直线电机进行测试,测试中使用Turbo Pmac Clipper作为运动控制器,对直线电机进行速度测试。运用前馈+PID算法调节,尽可能得到设计的响应曲线,并且减小直线电机跟随误差。结果表明,使用该控制方法能使直线电机的进给系统得到良好的动态及静态性能。
关键词 直线电机;PMAC;前馈+PID算法
传统的传动机构如齿轮、蜗轮、皮带、丝杠、滚珠丝杠、联轴器、离合器等中间传动机构,容易产生很多如:较大的转动惯量、弹性形变、反向间隙、摩擦、振动、磨损等问题,所以不仅减小了传动效率,而且还增加了成本,降低了系统的可靠性。虽然这些传动机构性能已经得到了改善,但是其间接传动的本质不能从根本上解决。于是“直接驱动”概念应运而生,直接驱动是指不使用任何中间传动机构,直接将动力源与负载相连进行驱动。这种传动具有结构简单、动态响应快、速度和加速度大、精度高、振动和噪声小等优点。
直线电机就是直接驱动的装置,其中控制技术是直线电动机设计和应用的重点。PID调节是最早出现的一种自动控制方法,控制简单而且效果显著。尤其是在高精度运动控制中,运用多闭环控制已经越来越广泛,伺服系统一般是三环系统,外环为位置环,内环依次为速度环、电流环。电机三环控制框图如图1所示。但是传统的PID控制算法不能对摩擦力、负载扰动等外界干扰及时消除,直线电机对负载扰动、摩擦力敏感,极易产生较大的稳态误差,降低了控制精度。基于以上问题,提出抗干扰较强的PID+前馈算法,并用实验验证这种控制方法可以提高控制精度。

1 直线电机运动控制原理
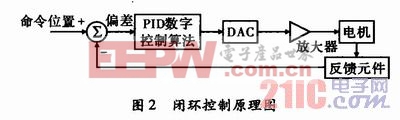
直线电机进给机构采用闭环控制,使用Renishaw高精度直线光栅尺作为位置反馈元件,安装于电机平台底部,与平台固定为一体,由于没有与电机直接接触,不会对直线电机运动产生磨擦力。光栅反馈信号首先进入放大器编码器输入端口,并由放大器的等量输出端口反馈到PMAC卡,组成双闭环反馈,根据光栅尺反馈的脉冲信号即可计算直线电机当前位置,由控制器的PID调节器根据目标位移与实际位移的差值自动调节电机的控制参数,完成所需的进给。闭环控制原理,如图2所示。
PMAC控制的直线电机伺服系统是一个高速动态系统,复杂的控制算法无法在如此短的时间内完成伺服计算,所应该采用计算量比较小的伺服算法。传统的PID环节是偏差控制器,被控制量需要偏离设定值才能通过偏差进行控制,存在一定的滞后性;由于系统受到扰动,再加上系统本身结构和参数的变化而产生的误差,不能在闭环系统中消除,所以需要对系统进行补偿,抵消扰动对系统的影响,即所谓的扰动补偿。控制框图如图3所示。
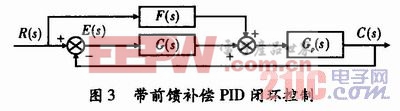
图3为带前馈的控制结构框图,其中,R(s)为系统输入;E(s)为系统误差;C(s)为系统的输出;G(s)为PID控制器传递函数;Gp(s)为被控对象的传递函数;F(s)为前馈环节的传递函数。得出带前馈的系统误差传递函数

式(1)说明,当前馈函数满足F(s)=Gp(s)-1时,误差函数为0,则C(s)=R(s)。说明无论输入信号如何变化,系统的误差始终为0。前馈补偿比只按误差控制的闭环系统效果好。通常前馈微分阶次为2时即可获得满意的控制效果。

pid控制器相关文章:pid控制器原理






评论