数控机床大推力永磁同步直线电机控制方法
3 直线电机的测试实验
PMAC执行程序Pewin提供了调节PID参数的工具PMAC Tuning Pro,可以方便地调节PID参数。打开Pewin首先调节系统的开环特性,开环特性调节完毕后,调整系统的稳态特性,分别调节PID参数中的比例增益、微分增益、积分增益,使系统阶跃响应曲线稳态误差为0,并且超调量不要过大,得到良好的误差曲线。最后调节系统的动态特性,以正弦信号为输入调节系统的跟随误差,根据正弦响应曲线调整适当的速度、加速度前馈系数,使系统的跟随误差最小,得到较好的动态响应曲线。
经反复调试比较,得到图7的阶跃线响应曲线。从图中可以看出,系统有较好的阶跃响应曲线,证明PMAC卡对直线电机的控制具有良好的效果。本文引用地址:http://www.eepw.com.cn/article/161818.htm
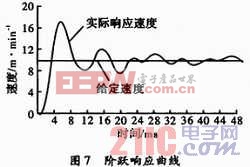
图8为稳态时给定速度为10 m·min-1时,给定速度与实际速度的比较曲线。
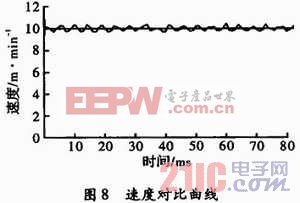
速度波动

速度波动在误差允许范围之内。
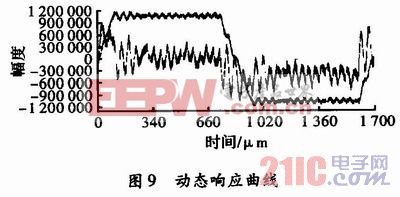
图9为系统的动态响应曲线,从曲线上可以看出,最大的跟随误差为420μm。
4 结束语
依据直线电机的伺服特点,提出了前馈+PID算法的控制策略,运用该控制策略使直线电机具有良好的速度稳定性以及较小的跟随误差。伺服算法嵌入到Turbo Pmae Clipper中,利用PMAC Tuming Pro2可以方便地对系统的控制参数进行调节,为以后直线电机朝着高速度、高精度的方向发展提供了支持。

pid控制器相关文章:pid控制器原理












评论