位差超声波传感器在智能玩具机器人中的应用

摘要:超声波传感器是利用超声波的特性研制而成的传感器,它在非接触性测量方面应用非常广泛,笔者根据智能玩具机器人的距离感知系统的软硬件设计过程,介绍了位差超声波传感器在智能玩具机器人中的应用,给出了位差超声波传感器与单片机系统的硬件电路接口和距离检测软件的编程思路,并通过实验,得出了其测量精度与测量距离以及与被测物体反射角之间的关系。
关键词:超声波;机器人;传感器;距离检测
目前国内生产的电子玩具技术含量较低,由于不具备智能化,利润空间小,受欢迎程度低。近年来,伴随计算机技术的高速发展,智能控制器的发展迅速,一些典型的智能玩具如轮式移动机器人在部分院校教学中得到推广,因为智能玩具机器人是一个典型的机电一体化系统,它融合制造技术、机械、电子、传感器、计算机和人工智能等众多先进技术,是进行工程训练、教学实验和研究的理想平台,在电子学教学领域中有着诸多的研究价值。
传感器是智能机器人获取外界数据的“感知系统”,离开智能传感器的机器人大多是些功能单一,不具备思维能力,有些甚至是底盘基座固定式的,使得这些机器人只能固定在某一位置按照事先设定动作进行机械式的重复操作,其应用范围仅限于工业生产中的重复性工作,不便于普及和推广,可见基于传感器的智能控制器在实现玩具机器人的智能化的作用中不可或缺,笔者介绍了一种基于超声波原理的位差超声波传感器在智能玩具教育机器人中的应用,通过较为具体的设计过程介绍了智能玩具机器人距离测试系统的软硬件设计方法,并对位差超声波传感器的性能指标和一些关键技术作较深入地探讨,提出了一些编程控制技巧及算法。
1 硬件设计
采用“MCU+传感器+显示设备+执行机构”的总体设计方案,要求MCU对非接触式传感器获取的外部距离信息进行计算转换,将得出的智能玩具机器人与前方障碍物的距离值送到显示设备显示,并根据程序设定的距离阈值控制智能玩具机器人实现自动导航功能,系统整体框图如图1所示。
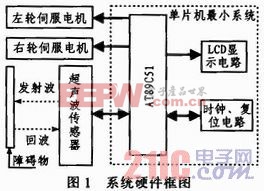
其中系统MCU采用目前性价比较高的AT89C51单片机,利用“位差超声波传感器”作为距离传感器,以非接触的形式测量前方物体的距离;显示设备采用LCD1602液晶显示模块;执行机构采用PARALLAX公司生产的连续旋转伺服电机,其优点是编程控制方便且不需额外增加驱动电路,图1中超声波传感器测距的工作原理如图2所示。
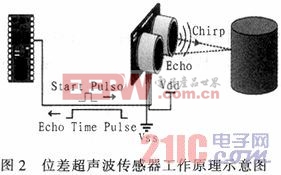
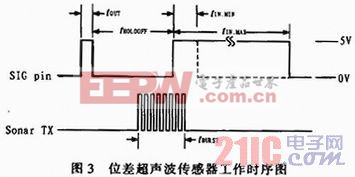
超声波传感器与单片机系统进行接口构成距离检测的硬件系统,在系统软件的控制下,单片机向位差超声波传感器发送的一个触发脉冲,位差超声波传感器被此脉冲触发后会产生一道短40 kHz的脉冲电信号,此40 kHz的脉冲电信号通过激励换能器处理以后,将转换成机械振动的能量,其振动频率约在20 kHz以上,由此形成了超声波,该信号经锥形“辐射口”处将超声波信号在空气中以每秒约1 130英尺的速度向外发射出去。当发射出去的超声波信号遇到障碍物以后,立即被反射回来。接收器接收到反射回来的超声波信号后,通过其内部转换,将超声波变成微弱的电振荡,并将信号进行放大,就可得到所需的脉冲信号,此脉冲信号再返回给单片机,表示回波被探测,这个脉冲宽度就是对应于爆裂回声返回到传感器所需时间,其时序如图3所示。

伺服电机相关文章:伺服电机工作原理











评论