相位差模糊控制在线控制算法中的应用设计

摘要:在两级递阶控制模型基础上,针对不同的控制参数,完成相应的模糊控制器设计。详细介绍了相位差模糊控制器的原理和设计过程,并将交通信息参数的变化量加入到了模糊控制器的输入中,增加了模糊控制器的准确性和全面性。通过对实际干线的实例仿真证明本设计方法可以有效地减少车辆的平均延误时间。
关键词:城市交通信号控制;线控制;相位差模糊控制;论域变换
0 引言
随着我国经济的迅猛发展和社会的不断进步,各种车辆保有量逐年增加,城市交通需求和交通供给的矛盾越来越突出,交通拥挤状况越来越严重。据研究表明,交通拥挤往往突出表现在道路的交叉口处,而主干线是城市交通的主体部分,又是保证城市社会经济活动正常运转的主动脉,因此对于主干线上交叉口的协调控制研究就显得很重要。
传统的控制方法通过建立精确的数学模型或预先人为地设定多套方案,控制效果都难以尽如人意。而模糊算法是基于规则和经验的,不需要建立精确数学模型,比较适合于交通系统应用,所以本文在模糊算法的基础上做进一步的研究。
1977年Pappis首先将模糊逻辑概念应用到交通控制,从此模糊方法开始在交通领域中应用。Nakatsuyama.M基于模糊神经结构来构建定性智能系统知识推理模块,以完成实时动态交通控制。K.Kaqolanumu等则利用模糊规则与算法更新相位及绿灯时间实现了针对孤立路口的智能控制器。还有其他很多文献都有模糊方法的不同使用,但是在干线交叉口的协调控制上,采用多个模糊控制器进行协调控制的方法,目前还没有在相关文献中看到。
本文在前人研究的基础上,基于两级递阶控制模型,针对不同的控制参数,分别设计相应的模糊控制器,并详细介绍相位差模糊控制器的设计过程。
1 线控制的路口模型
线控制的基本思想是:把干线上一批相邻交叉口的交通信号进行协调控制,使得进入干线的车队按某一车速行使时,能不遇或者少遇红灯。
在干线控制中,一般指定一个关键交叉路口为相位差基准参考点。大量的应用实践表明:当相邻交叉口之间的距离超过800 m时,整条干线上的协调控制反而不如各交叉口的单独控制效果好,因此在本文中假设线控路口模型中相邻两交叉口的距离均适合采用线控制方式。
城市交通信号线控制的路口模型如图1所示。
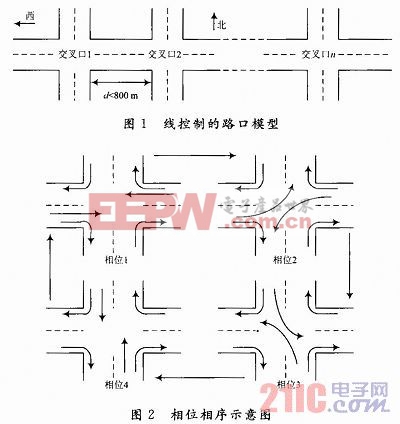
设每个路口的每个方向有三个车道,分别为左转、直行和右转车道。本文选择较为常用的四相位控制,对各向左转相单独设置相位,让该相位有充足的时间和空间放行,这样消除了直行车和对面左转车的冲突,提高了行车安全,由于车辆都是靠右行驶的,所以右转车流不加控制。为了保证线控制系统的稳定,本文采用固定相序。路口相位相序示意图如图2所示。
2 线控制的分级递阶模糊控制算法
线控制中有三个控制参数:周期C、绿信比λ和相位差tos。进行线控制时要保证每个交叉口的周期相同,从而保证干线的相位差稳定。绿信比是根据各交叉口的排队长度实时确定;相位差是根据路口距离以及路段速度确定。如果同时考虑信号周期、绿信比和相位差的优化,将使问题的求解过程十分复杂。根据系统工程中大系统分解一协调思想,本文对线控制采用两级递阶结构,其结构图如图3所示。
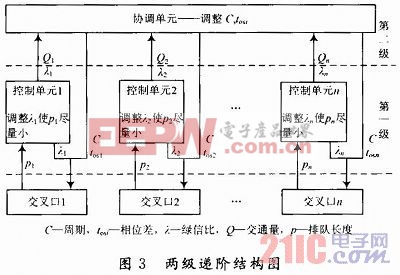
第一级为控制级,主要由n个相似的模糊逻辑控制器组成。其主要任务是:根据检测器检测的交通信息参数来分别确定每个交叉路口的绿信比,并在每周期末把交通信息参数和绿信比传送给协调级;
第二级为协调级,其主要任务是:根据控制级传来的交通信息参数,确定线控制中的公共周期以及各路口的相位差。
本文详细介绍相位差的模糊控制器设计,其他的控制单元可以参照设计。
3 相位差模糊控制器的设计
在干线协调控制中相位差是关键控制参数之一。相位差即交叉口协调相位绿灯开启时间之间的差值。
由相位差的概念很容易想到用交叉口之间的距离除以车流速度就可以得到相位差,即求解相位差的关键就是求解两交叉口之间的车流速度。而车流的速度总是和车流密度密切相关连的,这是由于驾驶员出于安全考虑,总是根据车辆间距的大小来调整自己的车速。鉴于此,文献都是以线控制本信号控制阶段的车辆密度为模糊控制器的输入来决定下一信号控制阶段的车流速度。本文在前人研究的基础上提出增加一个输入——本信号控制阶段和上一信号控制阶段的车辆密度的差值,来决定下一信号控制阶段的相位差,这样就把车辆密度的变化趋势考虑进来了。
相位差模糊控制器的输入为本路口和上一路口之间的车辆密度ρ和车辆密度变化值△ρ,输出为车流速度v。
相位差模糊控制器的设计框图如图4所示。

(1)论域变换
①确定输入、输出变量的基本论域
输入:交叉口前车流密度一般在0~120之间变化,所以车流密度的基本论域为[0,120];交叉口前车流密度变化值一般在-30~30之间变化,所以车流密度变化的基本论域为:[-30,30]。
输出:车速一般在0~90之间变化,所以车速的基本论域为[0,90]。
②确定输入、输出变量的论域元素
选用的ρ论域为:{0,1,2,3,4,5,6,7,8,9,10};
选用△ρ的论域为:{-5,-4,-3,-2,-1,0,1,2,3,4,5};
选用v的论域为:{0,1,2,3,4,5,6,7,8,9,10}。








评论