基于激光传感器的自主寻径智能车设计

摘要:设计了一种基于激光传感器的自主寻径智能模型车系统,以飞思卡尔公司1 6位单片机MC9S12XS128为核心控制器;系统采用激光传感器阵列检测路径信息,得到智能车与路径的横向偏差,采用比例控制算法控制舵机转向,并对直流驱动电机进行增量式PID闭环调节控制,从而实现智能模型车快速稳定地自主寻径行驶。
关键词:智能车;激光传感器;MC9S12XS128;比例控制;PID控制
0 引言
智能车技术涵盖了车辆工程、传感器、人工智能、自动控制、汽车电子、计算机等多个学科领域,智能车的研究在智能交通领域已成为研究热点。飞思卡尔智能汽车竞赛要求参赛车模沿着仟意给定的黑色带状路径,通过控制转向和车速,在稳定的前提下以最快的速度完成自主寻径。
本文以此为背景,设计了基于MC9S12XS128微控制器的智能车系统,采用激光传感器阵列识别路径信息,得到智能车中心线与路径中轴线的横向偏差,采用比例控制算法控制舵机转向,并对直流驱动电机进行增量式PID闭环调节控制,从而实现智能模型车快速稳定地自主寻径行驶。
1 智能车系统总体结构
智能车系统以飞思卡尔16位单片机MC9S12XS128为核心控制器,该款处理器标称40 MHz总线频率,片内集成128 KB的FLASH,8KB的RAM,集成8信道脉宽调制模块(PWM),10位模/数转换器(ADC),周期性中断定时器(PIT),增强型捕捉定时器(ECT)以及SCI、SPI等多种通信接口,工作温度范围大.为-40~125℃,核心控制器性能优越,能够满足本设计的需求。
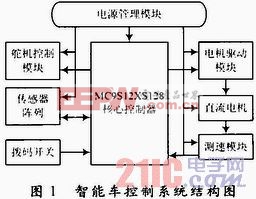
智能车系统主要包括单片机最小系统、路径识别模块(激光传感器阵列)、舵机控制模块、电机驱动模块、测速模块、电源管理模块等,硬件总体设计方案如图1所示。其中MC9S12XS128控制器是智能车的核心部件,负责接收激光传感器阵列获取的路径信息、小车速度、拨码开关等输入信息,进行数据处理后依据控制策略,输出相应控制量对舵机和直流驱动电机进行控制,完成智能车的转向、前进、减速等功能。












评论