交流传动电力机车直接转矩控制策略实现

摘要:直接转矩控制(DTC)是目前应用于交流传动电力机车异步牵引电机的控制策略。在此详细介绍了异步牵引电机在机车基速范围内,DTC的实现方式,通过Matlab/Simulink搭建了仿真模型,最后在基于TMS320VC33+TMS320LF2407A的双DSP控制器逆变器实验平台上完成了硬件实验,仿真和实验结果验证了控制策略的正确性。
关键词:异步电机;直接转矩控制;磁链轨迹;控制器
1 引言
对交流传动电力机车这类变流器开关频率较低而关断电流较大的交流传动控制系统而言,无论是使用矢量控制还是DTC策略,当它与空间矢量调制(SVPWM)策略结合时,在整个调速区段,定子磁链轨迹不可能一直保持为准圆形,都会从一定速度开始由异步调制向同步调制过渡,
以及在某个速度段内不同载波比的分段同步调制的过渡。异步调制利用较高的开关频率使定子磁链最大限度地逼近圆形,从而减少低速运行时定子电流畸变问题,分段同步调制使定子磁链轨迹转为多边形,降低了电机高速运行时逆变器开关频率和开关损耗,但分段同步调制算法较复杂。这里提出了一种适用于电力牵引的DTC方案,它由异步牵引电机低速运行的新型空间矢量异步调制DTC和高速运行时直接自控制(DSC)方式组成,通过速度阈值切换两套策略,完成了对异步牵引电机的闭环控制,仿真和实验验证了该方案有效。
2 牵引电机的直接转矩控制实现
2.1 低速异步空间矢量调制直接转矩控制
电力机车在低速区段使用新型基于SVPWM的DTC技术,如图1所示。
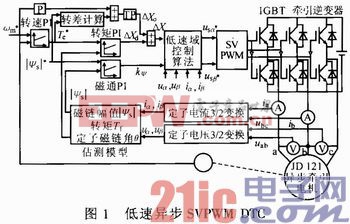
图1首先利用观测器估算(k-1)时刻静止α,β坐标系下定子磁链幅值|ψs|及其α,β轴上的分量ψsα和ψsβ,以及此时转矩Te,对转矩和磁链分别进行PI调节,那么转矩PI将调节出转矩动态增量△Xd,磁链PI将调节出磁链动态增量kψ,最后可得在此控制周期Ts结束时,希望定子磁链所在位置θref为当前磁通角度θ加上稳定运行扫过角度△Xσ以及△Xd,即:θref=θ+△Xσ+△Xd。
对于定子磁链幅值,设当前量为|ψs|,因此希望在Ts结束时,定子磁链幅值为|ψs|(1+kψ),最后可确定预测的![]() 那么在Ts内定子磁链的增量△ψs=ψsref-ψs(k-1)。假如Ts足够短,可认为有:
那么在Ts内定子磁链的增量△ψs=ψsref-ψs(k-1)。假如Ts足够短,可认为有:![]() 包含了下一时刻所希望得到的转矩值与|ψs|信息,将
包含了下一时刻所希望得到的转矩值与|ψs|信息,将![]() 进行空间矢量异步调制就可得到牵引逆变器的门极脉冲,从而控制电机。
进行空间矢量异步调制就可得到牵引逆变器的门极脉冲,从而控制电机。

pid控制器相关文章:pid控制器原理
矢量控制相关文章:矢量控制原理







评论