基于Matlab的模糊PID控制研究

摘要:以螺旋桨的电液比例周控制系统为研究对象,针对被控对象的非时变性和时变性的特点,采用了一种基于自适应模糊PID控制策略;利用Madab中Fuzzy和Simulink有机结合,方便的实现了模糊自整定PID参数控制系统的仿真;得到了自适应PID模糊控制比普通PID控制在被控对象上具有实时性好、稳定性高的结论。
关键词:螺旋桨;模糊PID控制;电液比例阀;Matlab仿真
0 引言
电液比例阀系统广泛应用于精度要求高的机械加工等行业,其传统的控制方式大多采用常规的PID控制技术,它具有简单、可靠、参数整定方便等优点。但由于电液比例阀系统受温度、负载等参数变化的影响较大,因而在控制性能要求高的场合往往不能满足。其主要原因是电液比例系统在流体动力学及电磁转换方面具有特殊性,是复杂的非线性高阶系统,系统设计时要建立准确的数学模型比较困难。
因此,如何使PID控制更好的应用于非线性系统的控制,并具有较好的智能性,是个值得研究的问题。基于以上原因,如果将基于规则的模糊控制用于PID控制器的设计,一方面可使PID控制器具有模糊控制的功能,又可使模糊控制具有确定的控制结构,从而使所设计的控制器具有两种控制的优点,同时又弥补对方的不足,达到既提高系统的动态特性,又保证系统稳态精度的要求,从而确保良好的设备控制效果。
1 电液比例阀的模糊PID控制器设计
1.1 模糊控制器的设计
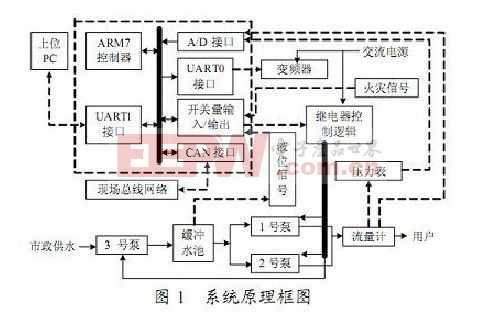
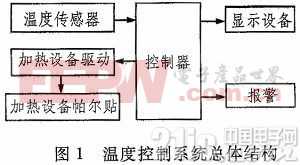
螺旋桨电液比例阀控制系统结构如图1所示。

自适应模糊PID控制器以误差E和误差变化率Ec作为输入,可以满足不同时刻偏差E和偏差变化率Ec对参数自调整的要求。利用模糊控制规则对参数进行修改便构成了自适应模糊PID系统。如图2所示。
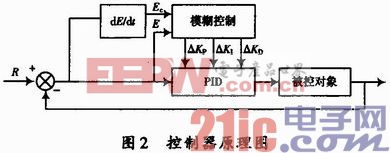
在本系统中模糊控制器将是设计的核心,因为它的好坏将直接影响到KI,KD和KP的选取,从而影响到系统的控制精度。
1.2 各变量隶属函数的确定
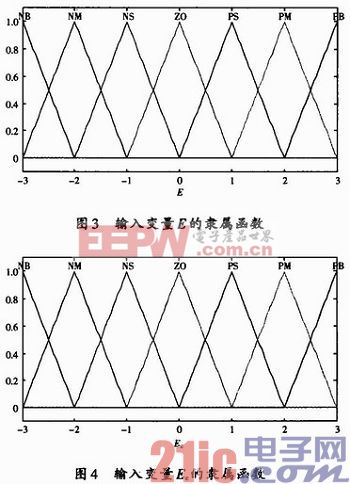
由文献可知,根据PID参数自整定原则,用于PID参数控制的模糊控制器采用二输入三输出的模糊控制器。以E和Ec为输入语言变量,以KI,KD和KP为输出语言变量。输入语言变量的语言值均取为“负大”(NB)、“负中”(NM)、“负小”(NS)、“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)七种。输出语言变量的语言值均取为“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)四种。将偏差E和偏差变化率Ec量化到(-3,3)的区域,输出量化到(0,3)的区域内,隶属函数曲线如图3,图4所示。
1.3 模糊规则
由于控制品质的好坏主要取决于控制参数的选择是否合理,通常不同的偏差E和偏差变化率Ec对PID控制器参数KP,KI,KD的整定要求不同。根据已有的控制系统设计经验,以及参数KI,KP和KD对系统的输出特性的影响关系,归纳出在一般情况下,不同的和时,被控过程对参数KI,KP和KD的自调整规则如下:
(1)当|E|较大时,为了加快系统的响应速度,应该取较大的KP。但为了避免由于开始时的偏差|E|的瞬时变大可能出现的微分过饱和而使控制作用超出许可的范围,应取较小的KD,同时为了防止系统响应出现较大的超调产生积分饱和应对积分作用加以限制通常取KI=0。
(2)当偏差|E|处于中等大小时,为使系统响应具有较小的超调,KP应取得小些。这时,KD的取值对系统影响较大,取值要大小适中以保证系统的响应速度。
(3)当偏差|E|较小即接近于设定值时,为使系统具有良好的稳态特性,应增加KP和KI的取值。同时为避免在系统的设定值附近出现振荡,KD值则根据|Ec|来确定:当|Ec|较小时,KD可取值大些;|Ec|较大时,KD应取小些。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理
评论