基于Matlab的模糊PID控制研究
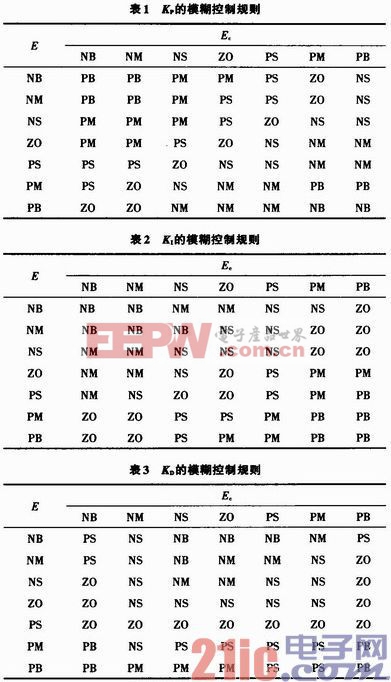
由此,可以建立KP,KI,KD的模糊控制规则,见表1~表3。本文引用地址:http://www.eepw.com.cn/article/159393.htm
1.4 模糊判决
把模糊量转换为精确量的过程称为清晰化,又称为去模糊化或模糊判决。为了获得准确的控制量,就要求模糊方法能够很好的输出隶属函数的计算结果。输出控制量U是一个模糊子集,它是反映控制语言取值的一种组合。应用模糊判决,即按加权平均法、隶属度最大法或中位方法等原则,求出相应的控制量U。本系统采用工业控制中广泛使用的加权平均法。该方法针对论域中的每个元素(i=1,2,…,n),以它作为待判决输出模糊集合的隶属度μ(i)的加权系数,取输出变量电压加权平均值u为:
![]()
平均值u就是应用加权平均法为模糊集合求得的判决结果。最后用输出量化因子乘以u来满足控制要求,从而得到控制量的实际值。
2 系统仿真分析
2.1 仿真控制对象
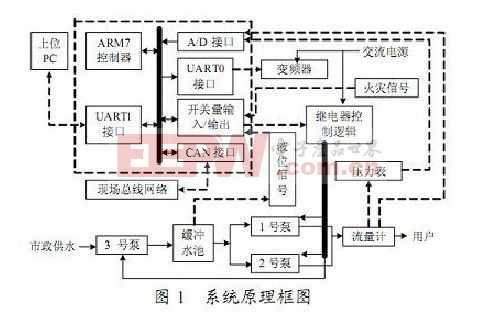
仿真控制模型的搭建,是验证系统控制算法准确性的基础。由于该模糊PID控制器用于液压系统中,因此由系统框图1可知,需求出各环节的传递函数。
(1)比例方向阀:根据测试结果,工程上将比例方向阀视为一个二阶环节。其传递函数为

式中:Kq为比例方向阀的流量增益(单位:m3/(s·A));ωv为比例方向阀的相频宽(单位:rad/s);δv为比例方向阀的阻尼比。
(2)液压缸-负载环节,在工程上视为一个积分与二阶环节的组合,即其传递函数为:
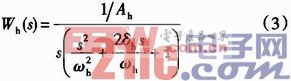
式中:Ah为液压缸的有效作用面积(单位:m2);δh为液压缸-负载质量系统的阻尼比;ωh为液压缸-负载质量系统的固有频率(单位:rad/s)。
由此,可以分析出闭环控制系统的开环传递函数为:

式中:Ka为比例放大器的增益(单位:A/V),可视为比例环节;Kc为闭环系统的开环增益。
2.2 系统控制模型仿真
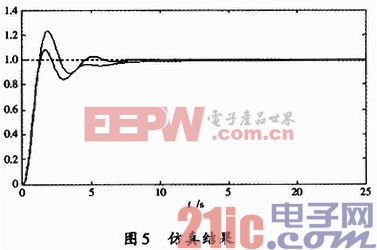
搭建好模型之后,利用Matlab/Simulink中的模糊控制工具箱建立模糊PID控制器与常规PID控制器,并分别搭建仿真模型进行仿真。根据控制要求以及参数整定值,得到模糊控制及常规控制的响应曲线,如图5所示。
3 结论
以上仿真结果表明:控制器参数的变化对系统的控制性能有很大影响,要合理选取参数,获得最佳PID控制特性。采用模糊控制算法,系统响应速度快,稳态性能好,具有较强的鲁棒性,这是常规PID控制难以实现的,对于螺旋桨上的液压控制系统有着较强的实际应用。

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理


评论