一种多制式传感器的数据融合算法

摘要:为了对付现代战争的“四大威胁”,采用分布式、多制式传感器组网对敌方目标进行探测已经变得十分必要,而多制式传感器组网的关键技术之一是数据融合问题。分析了三坐标雷达、两坐标雷达和红外探测器这三种常见种类的传感器点迹几何模型,提出了一种针对这三种不同制式传感器的数据融合算法,并在某工程中得到了成功应用。
关键词:多制式;测量相关;航迹相关;数据融合
0 引言
将不同制式的传感器采用分布式、组网探测的方式能够有效对付现代战争的“四大威胁”。在分布式组网探测系统中,通常采取如下方式进行处理:首先由各个探测器形成局部航迹;然后将航迹数据上报到上级情报中心;最后情报中心对各局部航迹进行数据融合得到一个次优的融合航迹。多种传感器的目标关联方法主要有两种方案,一种是测量一航迹关联方案;另一种是航迹一航迹关联方案。
本文在此分析讨论的航迹一航迹关联算法,适用于包含有三坐标雷达、两坐标雷达和红外探测器这三种传感器组成的分布式网络处理系统。在该分布式处理系统中,各个探测器先各自形成独立的局部航迹,然后将航迹数据上报到情报融合中心进行数据融合处理并最终形成融合航迹。情报融合中心数据处理的难点在于有三种探测器测量值形式各不相同,除三坐标雷达的局部航迹可以提供状态估计以外,另外两种传感器都仅能提供每条局部航迹对应的测量集。
1 模型建立与分析
下面以三种探测值的几何模型为基础定义测量一测量间的距离,在此基础上进一步定义了测量集一测量集间的距离,并作为航迹一航迹关联的定量度量。通过这种处理后,航迹关联问题被转化为了单纯的聚类问题。在状态估计上本文采用数据压缩方式。即先用极大似然估计法从相关的多个测量数据中估计出融合点迹中心,最后用卡尔曼滤波器组得出最终的融合航迹。
1.1 三坐标探测器点迹的几何模型
三坐标雷达的测向量为z=(r,θ,φ),其中r为斜距,θ为方位角,φ是高低角。三坐标雷达点迹测量几何模型如图1所示。
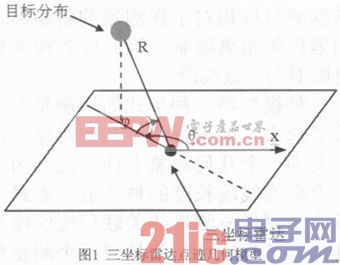
三坐标雷达的一次测量能够确定目标在z=(r,θ,φ)所代表的点的附近,因此其测量点迹的几何模型为一个点。
1.2 两坐标雷达点迹几何模型
两坐标雷达的测向量形如z=(r,θ,φ),其中r为斜距,θ为方位角。两坐标雷达点迹几何模型如图2所示。
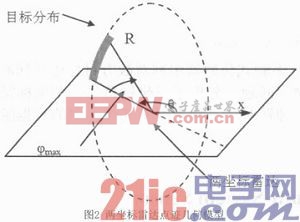
两坐标雷达只能探测到斜距和方位角,通过其测量只能确定目标在一个位于竖直平面内的半径为r的圆弧附近。并且受两坐标雷达高低角探测范围限制,所以两坐标雷达的测量点迹的几何模型为一段弧线。


评论