数据融合技术在车辆动态称重系统中的应用
摘要:基于车辆动态称重系统的结构和特点,采用了一种基于最优加权平均的数据融合处理方法,将其应用到动态称重系统中,并完成系统的软硬件设计。通过对融合前后的实验数据进行比较分析,可有效地降低传感器在工作过程中受多种因素的交叉干扰影响,提高了车辆动态称重系统抗干扰能力,以保证参数检测的可靠性和准确性。
关键词:动态称重系统;传感器;加权平均;数据融合
随着社会经济的发展和经济区域分工的扩大,公路交通量迅速增长,尤其是货运汽车的数量逐年递增,其中一些司机不顾车辆和公路承载能力和行车安全,擅自对车辆进行超载改装,使公路遭到严重破坏,由此而引发的交通事故日益增多。因此,为保护公路完好畅通,严格限制超限车辆势在必行。
动态称重系统是利用传感器测量行使中动态轮胎的受力信号,再对这些受力信号的分析来计算相应静态车辆重量的过程。与传统的汽车静态称重不同,动态称重不需要汽车停车待称,只要汽车经过称重传感器即可以实现称重,因此具有及时性、隐蔽性和连续性,既实现了称重,又不影响正常的交通,是一个十分有价值的研究课题。
1 电路设计
车辆称重系统硬件结构框图如图1所示,压力传感器、测速传感器、模拟信号处理电路、A/D转换电路、按键、液晶显示模块、打印机、PC机。电路主要芯片包括CPU为T2368BI,A/D转换芯片AD7799,RS232电平转换器芯片SP3223EEY以及LCD接口电路和键盘接口电路。
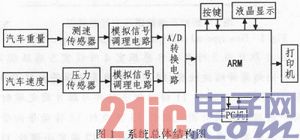
当汽车通过压力板时,压力传感器将压力信号转换成模拟电信号,再通过仪表放大器送到A/D转换器的模拟输入端,将转换后的数字量进行采样处理,把处理结果作为动态称重重量送到LCD上显示,同时将数据送入打印机打印,或者可以将数据通过RS232电平转换器送入计算机中储存或进一步进行处理。
2 常用数据融合理论
传感器数据融合是指对来自多个传感器的数据进行多级别、多方面、多层次的处理与综合,从而获得更精确、更可靠的有用信息。与只采用单一传感器的系统相比,来自多个传感器的信息具有冗余性、互补性、关联性。多传感器数据融合就是要充分利用多个传感器的资源,通过对各种传感器及其观测信息的合理支配与使用,将各种传感器在空间和时间上的互补与冗余信息根据某种优化准则组合起来。目前,在国外,多传感器融合系统已被广泛地应用于战场分析监视、弹道导弹防御、目标跟踪、机器人、自动小车、辅助驾驶、复杂智能制造系统以及核电站监控等领域。根据传感器采集信息的多样性,智能仪表的多传感器信息融合采用了3种方式:相关信息融合、互补信息融合和协同信息融合。
2.1 相关信息融合
相关信息是指由一组传感器获取的关于同一环境特征的信息。例如在对某一对象进行检测时,可在同一区域中放置多个传感器,这些传感器的输出信息即为关于检测对象的相关信息。
2.2 互补信息融合
互补信息就是两个或更多个独立传感器从不同面对同一对象或环境的描述,彼此间又不相互重复的多个信息。互补信息的融合可以给出关于对象和环境的更全面、更完整的描述:有时可以使多传感器系统感知到那些每个单一传感器无法获得的对象和环境特征。
2.3 协同信息融合
协同信息是指在多传感器系统中,传感器获得的相互依赖或相互配合的多源数据信息。
总之,多传感器数据融合的目标即通过组合获得比任何单个传感器更准确的信息,达到传感器之间最佳协调的结果,即通过多传感器之间的协调和性能互补的优势来提高整个传感器系统的性能。
3 数据融合在车辆动态称重技术中的应用
在车辆动态称重系统中主要应用了两种数据融合方法,称重板同类传感器的多传感器数据融合和压力传感器、加速度传感器的异类传感器数据融合。(这里采用最优加权平均进行数据融合)。
3.1 同类传感器的多数据融合
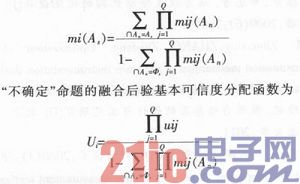
设第i个传感器(i=1,2,…,P),Q个测量周期中得到的第s个命题As(s=1,2,…,K),它的单传感器多测量周期融合后验基本可信度分配函数为
3.2 异类传感器数据融合
假定压力传感器和加速度传感器测量误差是相互独立、零均值和恒定方差的高斯分布随机变量,则
x(t+1)=φ(t)x(t)+B(t)u(t)+Γ(t)w(t) (1)
yi(t)=Hi(t)x(t)+Vi(t) (2)
上式中x(t)∈Rn是压力测量值,i=1,2……,l是测量结果u(t)∈Rp是控制输入,w(t)∈Rr是加速度测量值,Vi(t)∈Rmi,i=1,2……,l而φ(t),B(t),Γ(t),Hi(t)是时变矩阵。
车辆动态称重关键是智能压力检测,采用最优加权平均进行数据融合的智能压力检测系统由4部分构成:传感器模块、信号调理模块、数据融合中心模块和显示电路等。其工作过程为:传感器和信号调理模块完成对输入信号的检测和处理工作,融合中心综合各传感器的信息,并进行相应的数据处理后,最终结果由显示电路显示出来。如图2所示。

1)传感器部分输出2个电压信号,其中U1为被测压力P的电压输出信号,U2为一个非目标参量的检测电压信号。
一个理想的压力传感器,其输出U应为输入压力的一元函数值,即U=f(P)。其反函数为P=f(U)。
2)融合中心。融合中心采取的是基于加权平均的数据处理技术,使用加权平均法进行数据融合实际上就是求各传感器输出数据的加权平均值。若传感器i(i=1、2…n)输出为xi,测量结果均方差为σi,权值为Wi,数据融合结果为y=WX=[w1,w2,…,wn][x1,x2,…,xn]T。权值分配得当,融合效果较好;分配不合理。
对系统的精度和可靠性提高不大。权值最优分配的准则如下:

4 数据融合处理的效果
为了验证多传感器数据融合方法的效果,本文进行了一系列称重测量实验:传感器承受重量初始值为4吨,以后每次加重2吨,依次加载到22吨。数据融合前和融合后的重量值误差对比如下表所示。

由以上实验数据表明可见:在相同温度变化和电源波动的情况下,经过数据融合后的数据误差明显减少,其误差值小于静态时称重值的1.39%,非线性误差为1.16%,由此可见,融合后的值更接近理论值。所以说基于最优加权分配原则的多传感器数据融合技术能够有效降低或消除传感器在工作过程中受多种因素的交叉干扰影响。
5 结束语
针对车辆动态称重系统的结构和特点,笔者采用了几种数据融合计算方法,有效地提高车辆动态称重系统抗干扰能力,保证测量的可靠性和准确性。通过多次实验,文中设计的动态称重系统技术参数达到:在静态模式时,精确度高于20 kg;动态模式时,车辆以低于20 km/h的速度通过,误差小于静态时称重值的1.39%非线性误差为1.16%(轴载荷和总重)。本动态称重系统主要特性包括重量轻,便于携带;可外接计算机辅助设备;具有动静态两种工作方式;精确测量动态车辆的重量;自动将所测车辆重量与存储资料比较以确定车辆的净重或车是否超重等数据;全自动化的称重过程;资料自动存储以便检索、统计。












评论