一种EKF改进算法探讨

引言
本文引用地址:https://www.eepw.com.cn/article/155898.htmGPS就是通过接受卫星信号,进行定位或者导航的终端。而接受信号就必须用到天线。GPS卫星定位解算是根据伪距、伪距增量等测量值,计算接收机的位置P、速度V和时间T等信息的过程。目前GPS实时定位解算中最为常用的两种方法为迭代最小二乘算法(ILS)和扩展卡尔曼滤波(EKF)。为了准确计算接收机的三维位置以及时间未知数的值,解算过程需要至少4颗卫星的测量信息。但是当GPS信号出现遮挡时,接收机只能接收到3颗卫星的测量信息,解算方程就不够4个,ILS不再适用。引入EKF,利用随着时间推移的多组数据进行实时定位解算,但定位精度也很难满足用户的需求。
为了解决上述问题,本文提出了一种改进的EKF算法。利用在垂直地面方向上的位置变化缓慢这一运动特性,建立了改进EKF算法的系统模型,并通过理论分析得到了滤波器参数,最后利用真实的卫星数据进行验证。需要特别指出的是,由于本文提出的改进EKF算法利用的是在垂直地面方向上的位置变化缓慢的特征,故而该算法的适用场合为车载等地面用户的定位解算,不适合在垂直地面方向上高速运动的情形。
1 定位解算的系统模型
卫星定位解算的系统模型包括状态模型和观测模型两部分。令向量yt、xt分别表示系统模型的测量值和系统状态参量:
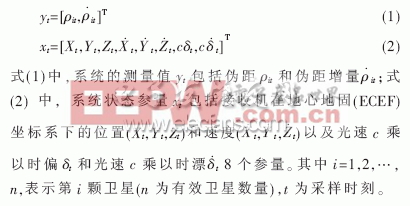
1.1 测量模型
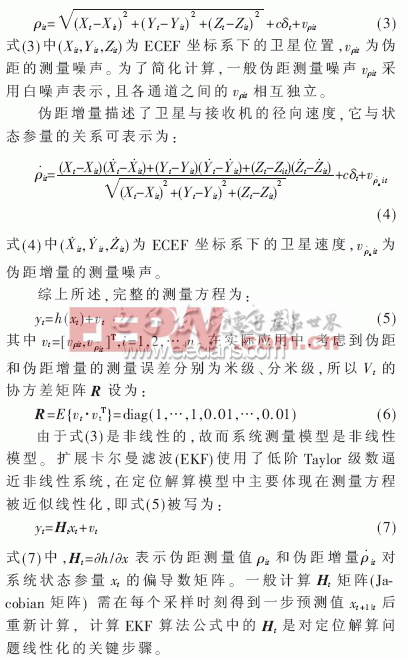
系统的测量模型描述了系统测量值与系统状态参量之间的关系。伪距与系统状态参量的关系可表示为:
1.2状态模型
系统的状态模型描述了系统状态参量的时间更新过程。更新过程的表达式为:

式(9)中的T为采样时间间隔。
式(8)中的wt表示系统状态转移的噪声模型:



评论