FMCW雷达系统及其前端数据采集模块设计

摘要 (FMCW)调频连续波雷达在汽车防撞系统中得到了广泛的应用。文中对近年来国内外汽车防撞系统的发展做了阐述和比较,以FMCW毫米波雷达作为系统前端,对防撞系统的原理、结构、信号的前置放大和模数转换等关键数据采集模块进行了介绍与设计。
关键词 FMCW;毫米波雷达;车辆防撞系统;前置放大
随着我国汽车总量的迅速上升,交通安全问题也引起了政府和社会的广泛关注。大量的研究表明,当意外发生时,车辆若能提前0.7 s制动,就可使碰撞死亡率下降75%;若能提前1.3s,则碰撞死亡率则将下降99%以上。因此,1.3 s的碰撞报警黄金时间可有效降低事故发生率。车载FMCW(Frequency Modulation Continuous Wave)雷达防撞系统是降低事故率的重要主动安全手段。
车载防撞雷达系统的研究始于20世纪60年代。90年代以后,奔驰、日产、丰田和福特等公司小批量安装过连续波雷达。奔驰S系列、美洲虎XKR系列、奥迪A8等高档车型上已有配备相关系统,但价格昂贵。我国汽车防撞雷达的研制起步较晚,虽已引起业界重视,但至今未有便于装车的微型化成品批量投入使用。FMCW雷达由于其本身在测距和测速方面的优势,已成为目前汽车主动防撞系统的首选。文中所介绍的基于FMCW技术的汽车防撞雷达系统,可以自动侦测两车之间的距离及相对速度,进行危险判断,提醒驾驶员作出相应反应或与刹车系统关联动作来避免两车相撞。
1 防撞雷达系统方案的选择及原理
1.1 汽车防撞探测技术的比较与选择
目前汽车防撞探测主要是采用红外、超声波、雷达等一些测量方式。其中红外、激光、摄像头等光学技术价格低廉且技术简单,但全天候工作效果不好;超声波受天气状态影响大,探测距离短,多用于倒车保护;而FMCW毫米波雷达则克服了上述几种探测方式在汽车防撞探测中的缺点,具有稳定的探测性能和良好的环境适应性。它不仅可测量目标距离,还可测量目标物体的相对速度及方位角等参数,使汽车在恶劣气候条件下实现盲行成为可能。此外,FMCW毫米波雷达结构简单、发射功率低、分辨率和灵敏度高、天线部件尺寸小,已成为主动防撞雷达的首选。
1.2 雷达频率的选择
雷达波的频率原则上并无特别的限制。目前,按照欧盟委员会的决定,从2005年下半年至2013年,在所有欧盟国家,汽车防撞雷达将使用K波段24 GHz的专门频带。虽K波段的24 GHz雷达的波长为12 mm,已经达到厘米波的范围,但在特性方面还是接近于毫米波,因此,还将它作为毫米波雷达来考虑。
1.3 FMCW雷达工作原理
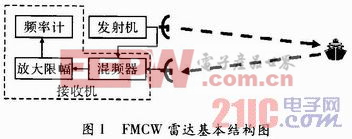
FMCW雷达的基本原理为,发射波为高频连续波,其频率随时间按照三角波规律变化。雷达接收的回波频率与发射的频率变化规律相同,都是三角波规律,只是有一个时间差,利用这个微小的时间差就可以计算出目标距离。其发射频率与接收频率的相对关系不仅可测量目标距离,而且还可测量目标径向速度v。图1为FMCW雷达的基本结构图。











评论