DSP实现仿生机器蟹多关节控制系统

仿生机器蟹控制系统需要较高的控制精度和运算速度,以便在机械结构刚度较高的情况下,通过提高响应速度来确保机器人的正常行走和姿态控制。由于在机器蟹腿节和胫节置有两个电机(如图1所示),使其质量较大,同时由于体积的限制使得各步行足相互间距较小,因此将造成机器蟹在行走过程中耦合较强,控制模型受躯体位姿、步行足位形和步态等因素的影响较大。这就要求控制系统控制结构灵活,具有调整步行足轨迹和步态的能力,并能适应控制模型的变化。因此必须研制一种具有强大运算处理能力、软硬件结构模块化的机器蟹控制系统。
本文引用地址:https://www.eepw.com.cn/article/150358.htm
1 多层多目标分布式控制概念及控制框架
仿生机器蟹是一个复杂的控制对象,从体系上讲,其每条步行足都是一个多自由度的串联臂机器人。要实现有效的控制,除要对每条步行足的三个驱动关节进行准确高效的控制外,多条步行足之间还要相互协调,共同完成某一确定工作。同时应考虑到各条步行足运动空间之间的相互重迭、相互干扰所形成的强耦合。
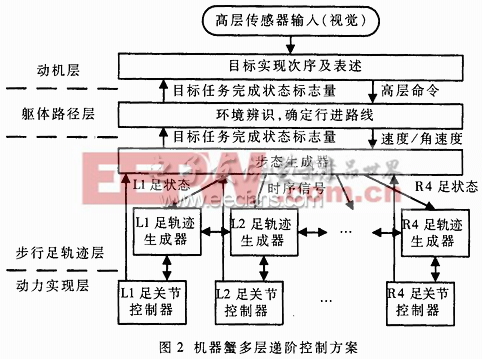
常用的控制方法有分散控制、分布式控制和递阶控制三种形式。由于递阶控制系统具有控制结构清晰、层次分明的特点,而分布式控制系统便于采用模块化结构且可扩展性好,因此机器蟹控制系统采用递阶控制和分布式控制相结合的控制结构设计。由于其控制结构较复杂,所以将整个控制体系分为任务规划、任务分解、躯体路径规划、运动协调、步行足轨迹规划、运动学/动力学计算、电机伺服控制等多层结构,而且每层之间要通过上层进行运动协调,例如各个步行足之间的运动控制协调,需要步行足控制层通过步行运动协调层交换信息。每条步行足的指关节之间的控制也是如此。因此,机器蟹控制系统采用多层多目标分布式递阶控制系统,如图2所示。
第一层称为“动机层”,它使得机器人本体能够做到完全的自主。其目的是将由外部环境变化或操作者命令引起的本体内部的响应翻译成对机器人本体的高级命令。第二层是“躯体路径层”,它接收“动机层”给出的高级命令,将其转化为一系列的本体内部的描述量及认知图,进而给出机器人自身躯体的运动路径。第三层称为“步行足轨迹层”,它针对躯体的运动路径给出各个足的具体的运动,包括步态的生成和腿的路径的生成。第四层是“动力实现层”,它通过驱动组件实现由“步行足轨迹层”给出的足的运动,并对由于系统的动力学不确定性和干扰造成的误差进行校正。各层之间,上层向下层输出控制量,由下层来具体实施。每执行一步,下层将状态信息实时地反馈给上层。










评论