基于DSP的稳定平台伺服系统的设计研究

在伺服电机和伺服驱动器组成的高性能稳定平台伺服系统中,需要实时地获得伺服电机的转角和转速信息,高速高精度的传感器以及相应的外围电路设计是必不可少的。由于单片机自身资源的局限性,难以满足现在伺服系统高精度、高运算率以及快速实时性的要求。在稳定平台伺服控制系统中,DSP已经逐渐取代单片机,成为主流芯片。本设计采用TI公司的32 bit浮点型DSP芯片TMS320F28335,其工作时钟频率高达150 MHz,具有强大的运算能力,能够实时地完成复杂的控制算法。片内集成了丰富的电机控制外围部件和电路,简化了控制电路的硬件设计,提高了系统的可靠性。
本研究采用DSP的新型开发板ICETEK-F28335-A,配合使用其中的EQEP模块和光电编码器设计了测量伺服电机转速的解决方案,同时利用该开发板上的数模转换(D/A)模块,经过电压转换放大完成对伺服电机转速的控制,实现了对稳定平台伺服电机控制的闭环系统。实践表明,该系统有功耗低、成本低和结构简单的优点,同时具有高精度、高分辨率以及快速实时性的特点,使稳定平台伺服系统达到了较好的控制效果。
1 稳定平台的伺服系统结构
稳定平台应用的主要技术是伺服控制技术,本系统实现了对松下伺服MINAS A系列伺服电机进行速度控制,其主要由松下伺服MINAS A系列的伺服驱动器、伺服电机、相应的光电编码器、TMS320F28335运动控制开发板、相应的ICETEK-5100USB仿真器以及实现闭环过程必需的外围电路组成。伺服系统的结构如图1所示。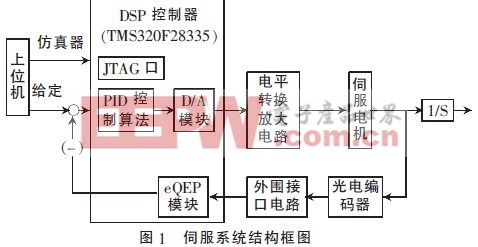
稳定平台的伺服系统实现速度闭环过程为:DSP控制器根据上位机给定的速度命令值减去速度反馈值算出电机速度的误差值,经过驱动单元的数字滤波器(调节算法)产生电机速度的控制信号,即D/A模块产生模拟量电压,经过电平转换到能够对伺服电机进行控制的电压范围,从而实现对伺服电机的转速控制。其中,反馈值是根据增量式光电编码器反馈的正交脉冲信号,经过光耦隔离、整形,将反馈信号提供给TMS320F28335的eQEP模块。采集脉冲信号根据M/T计数方法计算出电机转速,反馈给上位机,实现自动控制,从而使稳定平台能够隔离载体运动建立稳定基准面[1]。电源模块将开关电源提供的+5 V电压变换为+3.3 V为系统供电[2]。
2 伺服系统的硬件设计
2.1 TMS320F28335的eQEP模块
TMS320F28335的eQEP模块为增强型的正交解码模块,主要应用于运动控制系统中,它提供了编码器的直接接口,通过eQEP模块可以得到电机的位置、方向和速度信息。TMS320F28335中提供4个引脚信号经GPIO复用器进入到eQEP内部的正交解码模块, QDU(正交解码单元)对接收到的编码器的正交脉冲信号进行方向和脉冲的解码,解码之后得到4倍频的位置脉冲信号和方向信号,送到位置计数器中进行脉冲计数。设置编码器控制寄存器QDECCTL为正交计数模式,观察状态寄存器QEPSTS中的正交方向标志位来观察旋转方向,顺时针时进行增计数,逆时针时进行减计数。通过程序读取该位置计数器QPOSCNT的值就可以得到电机实际位置信息,通过该位置信息就可以与给定位置信息进行闭环控制。此外,还可以通过QCAP模块来计算电机的速度信息[3]。正交编码脉冲、定时器计数脉冲和计数方向时序逻辑如图2所示。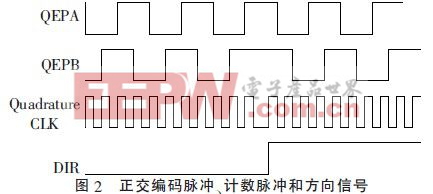
2.2 光电编码器和TMS320F28335的接口电路
伺服系统的编码器信号是从伺服驱动器上输出的差分信号,而DSP需要的是TTL信号,因此在采集前需要对编码器输出的信号OA+、OA-、OB+、OB-、OZ+和OZ-进行转换,本系统利用AM26LS32芯片进行差分信号的接收[4],接收后的输出信号为A、B和Z 3路信号,其中A、B信号相位差为90°。光电编码器输出的信号经过光电隔离、整形之后送到DSP eQEP模块的相应引脚,其接口电路如图3所示。其中,6N137是高速光耦芯片,实现数字信号和模拟信号的隔离;74HC14是高速CMOS反相器,实现对输入脉冲信号的整形。图3只给出了光电编码器输出的OA+、OA-两路信号的光电隔离和整形,光电隔离和整形后的信号送到TMS320F28335外设引脚的EQEP1A、EQEP1B和EQEP1I,进行正交解码。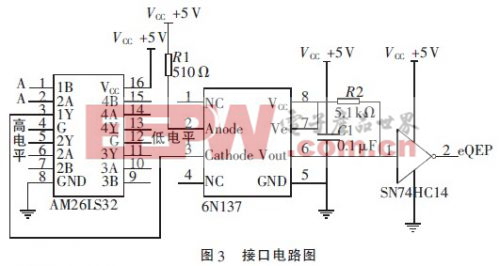


伺服电机相关文章:伺服电机工作原理









评论