智能车光电传感器布局对路径识别的影响研究
——
根据仿真,得到以下结果(图5):
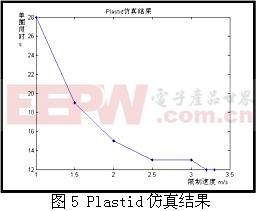
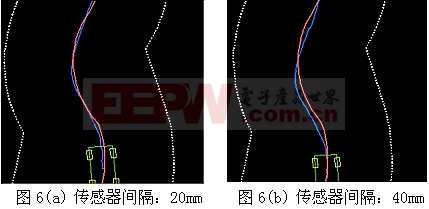
根据仿真的结果显示,传感器间隔对于过弯道精确性以及防止飞车的能力有很大的关联。
对于防飞车能力,我们可以用最大限制速度来衡量。20mm间隔的最大限制速度在3m/s,40mm间隔的最大限制速度则为3.3m/s。经过分析后,我们认为这是由于传感器间隔大造成车的横向控制范围较大(40mm的车控制在±13mm内,而20mm的则在±7mm内),因此它不易造成迷失。
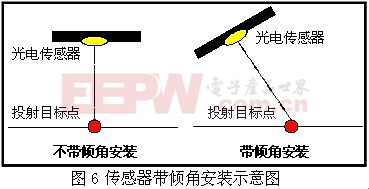
3.2 径向探出距离
径向探出距离是指光电传感器离车头的径向距离。它主要影响智能车的预测性能。对于未知的赛道,如果能早一步了解到前方道路的情况,那么就可以早些做出调整,从而使车以相应最优策略通过赛道。所以,理论上探出距离是越大越好,但是如果距离过大,智能车可能会发生重心偏移,造成行驶不稳、振动等一系列问题。因此,为了既能增加径向距离,又不引起重心偏移,我们可以采用带倾角的传感器安装方式,如图6中所示。
4 一字型与八字型布局研究
4.1 一字型布局




















评论