智能车光电传感器布局对路径识别的影响研究
一字型布局是传感器最常用的布局形式,即各个传感器都在一条直线上,从而保证纵向的一致性(图7),使其控制策略主要集中在横向上。
本文引用地址:http://www.eepw.com.cn/article/14478.htm
第三节中已经提到,对于不同的间隔选择,其出现情况数也相对不同。本仿真试验采用的是间隔大于25mm且两两并列的布局方式,这样在跑车时可以产生13种不同的情况(见图8),从而使得控制更精确。
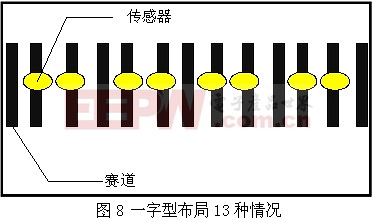
首先,对于传感器有输出值的(即其中有一传感器照到黑道)情况,则根据其所在的位置进行相应控制;其次,对于迷失情况,可利用之前哪个传感器输出情况来推断车此时进入哪一段区域。这里选用两两并列就是为了能明确区分出具体区域,如果不这样排列,则当出现迷失时,将无法判断黑道在左边还是右边。
4.2 八字型布局
八字型布局(见图9)从横向来看与一字型类似,但它增加了纵向的特性,从而具有了一定的前瞻性。
将中间两传感器进行前置的主要目的在于能够早一步了解到车前方是否为直道,从而可以进行加速。对于韩国大赛所使用的赛道来看,直道占了全程的50%以上,因此直道时的加速控制是很重要的。

我们知道,对于智能车能否顺利跑完全程,最重要的一点是过弯道,特别是通过比较急的弯道的能力。因此为了能够更早地预测到弯道的出现,我们还可以将左右两端的传感器进行适当前置,从而形成“W”型布局。
值得一提的是,由于纵向的排列不一致,就比一字型更增加了多传感器同时感应的可能性(一字型只可能是所有传感器同时感应,而八字型则可能出现几个传感器同时感应的现象)。因此,在决定控制策略时,必须要考虑这种情况,但反过来说,我们也可以利用这种情况的发生来完成一些特定的判断(比如某弯道角度的确定等),这就需要大家更深入的研究和尝试了。
5 其他因素
除了上述内容之外,在进行传感器布局时,还需要注意以下几个因素:
首先,大赛规则对于赛道的描述有提到“跑道可以交叉,交叉角为90°”,而在起跑点两边还分别有长100mm的起跑线。在比赛时智能车必须通过传感器将这两种线区别开来,因此这也是在传感器布局时所必须要考虑的问题之一。
其次,与韩国大赛不同,本次大赛可使用至多16个传感器(韩国比赛为8个),因此在排列上会有更大的自由性,更可以和其他传感器(例如CCD等)进行配合,从而实现更好的控制效果。
最后,由于本文采用的传感器输出值经过处理转换为数字信号,因此根本上来说,整个智能车的控制必定是不连续的控制。为了达到更好的控制效果,可以考虑不将传感器处理成数字信号,从而达到连续的控制效果,这也是一个值得探讨和深究的问题。




















评论