智能车光电传感器布局对路径识别的影响研究
——
由于光电传感器已可通过电路转换为数字量输出,因此在仿真系统中已简化为直接数字量输出,即当传感器遇到黑线时则输出为1,否则输出为0。Plastid仿真系统最多提供8个光电传感器,其安装坐标可任意选择,在仿真过程中会即时地将传感器的值以布尔型的数组类型输入给控制程序,如图3所示。
本文引用地址:http://www.eepw.com.cn/article/14478.htm
3 布局相关参数
有关传感器布局的参数有很多,本节将主要针对其中最重要的两个参数进行定性的讨论。
3.1 传感器间隔
各个传感器的布局间隔对智能车行车是有一定的影响的。
根据本届邀请赛的赛道规则,中间黑色导引线的宽度为25mm,因此如果要求传感器间不出现同时感应现象(即每次采集只出现一个传感器值为1),那么传感器间隔就必须大于25mm。如果将间隔设计成小于25mm,从而产生更多的情况,有利于车与赛道偏移距离的判断。此外,如果间隔过大,还会出现另一种情况,即在间隔之间出现空白。
为了便于比较不同的传感器间隔造成的影响,在Plastid仿真系统中使用相同的控制策略,并且在控制策略中设定了限制速度(从1m/s按0.5m/s的间隔递增,直到车出现飞车完成不了单圈为止),赛道也选用韩国大赛的标准赛道进行测试,仿真周期设为15ms。
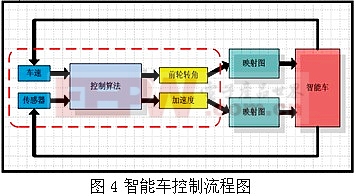
整个控制策略采用最简单的分段控制,如图4中的红框区域。




















评论