惯性MEMS倾角测量误差补偿设计

摘要:利用ADI公司的MEMS陀螺仪ADXRS612和ADuC7026微控制器,对飞行器在垂直起降阶段进行姿态倾角测量。由于该陀螺仪随着时间的积累,会产生较大漂移,采用ADI公司的MEMS加速度计ADIS16210对倾角进行测量,并采用最小二乘拟合推算了陀螺仪漂移误差模型,以补偿陀螺仪漂移误差,提高了飞行器垂直起降时的姿态控制精度。
本文引用地址:https://www.eepw.com.cn/article/133765.htm引言
利用惯性元件可以对运动体的姿态进行测量,惯性MEMS(微机电系统)元件是近年来新出现的惯性器件,其具有低成本、高可靠性、低功耗、尺寸小等技术优势,只是目前精度还比较低,但这项技术的性能每年都有大幅度提高,应用领域也日益广泛。
陀螺仪在进行运动体姿态角测量时,随着测量时间的增加会产生漂移,使所测得的姿态角不准确。在飞行器垂直起降阶段,飞行器可以看作是定基座装置,这样便可以用加速度计对飞行器进行等效倾角测量,并且因为加速度计漂移很小,其长时间测得的倾角也较为准确。因此,可以利用其对陀螺仪进行倾角测量的修正补偿。
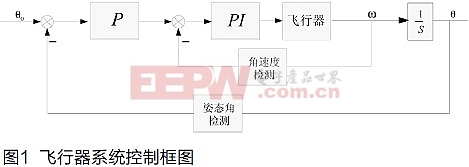
控制系统整体结构及倾角测量原理
飞行器垂直起降阶段控制系统框图如图1所示,由内外双回路控制系统实现,其中姿态角的检测用于外角度环的控制。
本次设计采用的MEMS惯性测量元件为ADI公司的陀螺仪ADXRS612,这是一款低成本角速率传感器,带有温度补偿输出,测量范围为±250°/s,输出比例因素为7mV/°/s,带宽为0.01Hz~2.5kHz可调,漂移约为6°/min,通过温度补偿算法可使漂移控制在200°/h,可用在惯性测量单元与平台稳定系统中。
利用ADXRS612进行姿态测量,只需将其输出对时间积分,即可得到被控对象在某一转动方向上的倾斜角。










评论