基于视觉传感器的智能车摄像头标定技术研究(下)
—— Research on Calibration Method for a Smart Car Based on Vision

(接上期)
本文引用地址:https://www.eepw.com.cn/article/110961.htm几何失真校正方法
建模分析
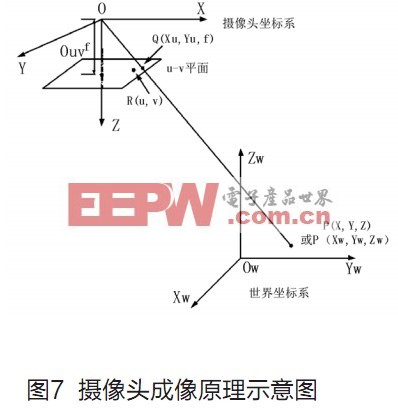
如图7所示,世界坐标系中的点P(Xw,Yw,Zw)首先经过刚体变换到摄像头坐标系中的点P(X,Y,Z)。
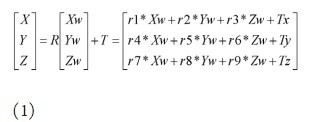
然后再从摄像头坐标系到理想的图像坐标系的透视变换。
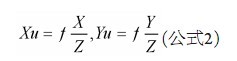
图8是一镜头理想成像原理图,图中左边的直线是目标,右边的直线是目标所成的象。从图中可以看出,目标中心点O点成象于象的中心O′点,目标上不同的两点A点和B点成象于A′和B′点,且有 。但大视场角使得广角镜头不能再等效为理想透镜,而是一个焦距随着目标离光轴距离增大而减小的成象系统。根据牛顿成象定理,目标高度r与对应象高r′之间的计算关系为
。但大视场角使得广角镜头不能再等效为理想透镜,而是一个焦距随着目标离光轴距离增大而减小的成象系统。根据牛顿成象定理,目标高度r与对应象高r′之间的计算关系为 。在物距m一定的情况下,焦距f愈小,象高r′愈小。这样,随着目标离光轴距离r的增加,焦距f随着减小,所成图象就产生了桶形失真。由以上的分析可看出,桶形失真可以看成像素点向心径向收缩,且随着目标距光轴距离r的增加,收缩率增大。因此,如果使失真图象中的像素离心径向按不同膨胀率增大,即可实现几何失真校正。
。在物距m一定的情况下,焦距f愈小,象高r′愈小。这样,随着目标离光轴距离r的增加,焦距f随着减小,所成图象就产生了桶形失真。由以上的分析可看出,桶形失真可以看成像素点向心径向收缩,且随着目标距光轴距离r的增加,收缩率增大。因此,如果使失真图象中的像素离心径向按不同膨胀率增大,即可实现几何失真校正。




















评论