基于DSP的红外双视场调焦系统设计

双视场红外光学系统能够同时提供两幅不同放大率、不同视场的图像,系统中的大视场分辨率较低,用于在大范围内搜索目标;小视场分辨率较高,用于对具体目标进行识别、分析和确认。因此红外双视场系统广泛地应用在机载、车载等光电侦察设备中。本文根据双视场红外光学系统的工作特点和技术要求,设计了一套基于DSP的光学镜头调焦系统。应用光机电一体化设计思想,通过沿轴平行移动光学镜组的方式实现大小视场快速切换及调焦的功能。
本文引用地址:https://www.eepw.com.cn/article/104016.htm1 调焦系统方案设计
1.1 调焦方式的选择
常见的双视场变焦系统分为两类:光学镜组移入移出切换式变焦系统和双位置变焦系统。切换式变焦系统需要将部分透镜插入到适当的位置改变光学系统的焦距,因此横向尺寸较大。双位置系统则是通过改变透镜组轴向距离而改变系统的焦距,可有效减小系统的体积,并且可同时实现视场切换和精密调焦的功能。
考虑到整体系统对质量、空间尺寸等方面的要求,采取沿轴平行移动光学镜组的双位置变焦系统。双位置变焦系统由前固定组、移动镜组和后固定组组成,其工作原理如图1所示,移动镜组在1位置时系统处于短焦距(大视场)状态,在2位置时系统处于长焦距(小视场)状态。

1.2 调焦运动系统设计
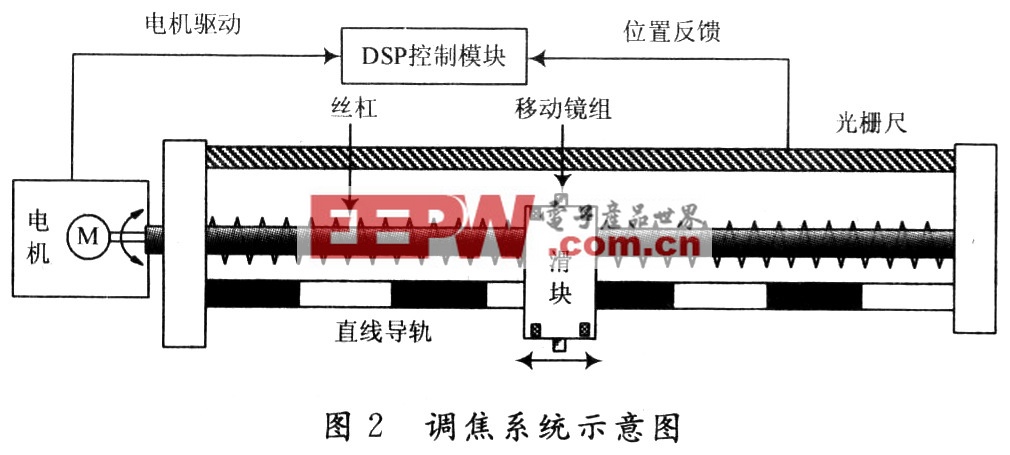
整个调焦运动系统由DSP控制模块为核心的一个闭环控制系统组成,其系统示意如图2所示,主要由以下几部分组成:DSP控制模块、伺服电机、丝杠、滑动模块、精密直线导轨、直线光栅尺等。DSP模块在接受上位机的控制指令后控制电机转动,通过丝杠导轨运动机构将电机旋转运动变为移动镜组的轴向直线运动,直线位光栅尺检测镜组滑动的当前位置并反馈给DSP控制模块,DSP控制模块将移动镜组的当前位置与系统的给定位置比较,进一步控制电机带动镜组沿轴向运动,直至移动镜组到达系统给定的位置。
2 调焦系统硬件设计
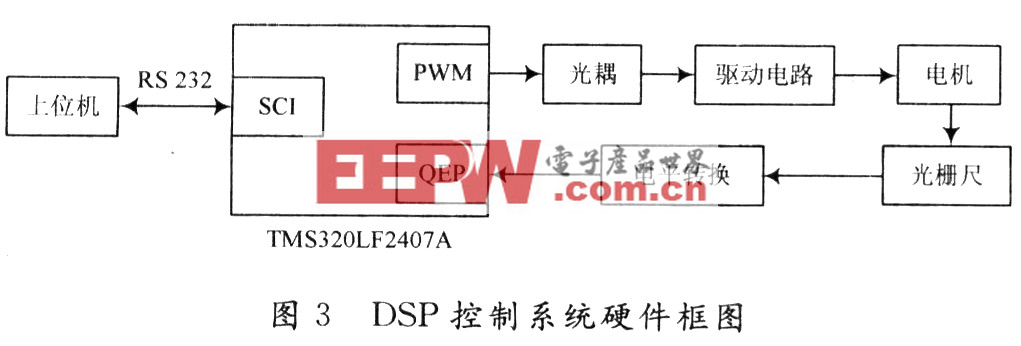
调焦系统硬件电路以DSP控制器为核心,TMS320LF2407A是一款16位定点数字信号处理器,它集高速数字信号处理能力及适用于电机控制的优化外围电路于一体,为电机控制提供了一套同时具备高精度和高性能的数字解决方案。控制系统外围电路部分的设计围绕着TMS320LF2407A展开,主要由以下基本部分组成:与上位机的串行通信接口电路,功率驱动电路,位置检测电路等。控制系统框图如图3所示。
2.1 SCI串行通信电路
本系统通过TMS320LF2407A芯片集成的串行通信模块SCI可以实现DSP与上位机之间的通信,电路采用了符合RS 232标准的MAX232驱动芯片。上位机向DSP控制模块发送控制指令,DSP系统响应上位机的控制指令,计算出移动镜组的给定位置,控制电机运动来完成系统调焦,同时向上位机返回调焦控制系统当前工作状态。
2.2 位置检测电路
移动镜组要实现精确的位置控制,其位移的检测是关键,选用英国Renishaw公司的:RGH22型精密型光栅尺作为位置传感器,分辨率为2μm,输出信号为符合工业标准的两路频率变化且正交(即相位差为90°)的脉冲。其读数头有参考零位和双限位开关,参考零位提供一个可重复定位的参考原点或零点,而限位开关可以在轴向运动到达两端限位点时输出信号,控制电机停止运动。
TMS320LF2407A的每个事件管理器EV含有一个正交解码脉冲电路QEP,该电路可对光栅尺产生的正交解码输入脉冲进行编码和计数。光栅尺产生正交编码脉冲送入正交编码电路后,QEP电路通过检测两个序列的先后,就可以确定移动镜组的运动方向,通过脉冲计数和脉冲频率可以计算出移动镜组的当前位移和运动速度。由于光栅尺输出的是5 V数字电平信号,而DSP只能接受3.3 V电平信号,因此采用SN74LVC245芯片作为DSP与光栅读数头的电平转换接口电路。
2.3 电机驱动电路
在调焦系统中,DSP将采集到的信息处理后输出的PWM信号不足以直接驱动电机运行,需要使用驱动芯片将其转换成可驱动电机的驱动信号。电机驱动电路采用SGS公司的电机驱动芯片L298N。它是恒压恒流双H桥电机芯片,可同时控制两台直流电机,输出电流可达到2 A。为了减小驱动电路对控制系统的影响,DSP产生的PWM信号经TLP521光耦进行光电隔离,再送给驱动芯片L298,这样使得系统控制信号变的稳定而且可靠。另外,在实际应用中为了保护电机,在驱动电路中需要加入两组续流二极管。
3 调焦控制系统软件设计
调焦控制系统的软件包括主程序和中断子程序。主程序主要完成DSP内核和外围器件的初始化、系统全局变量的定义和赋初值等,并检测电机的初始位置。初始化完成后系统进入中断等待状态。主程序流程图如图4所示。
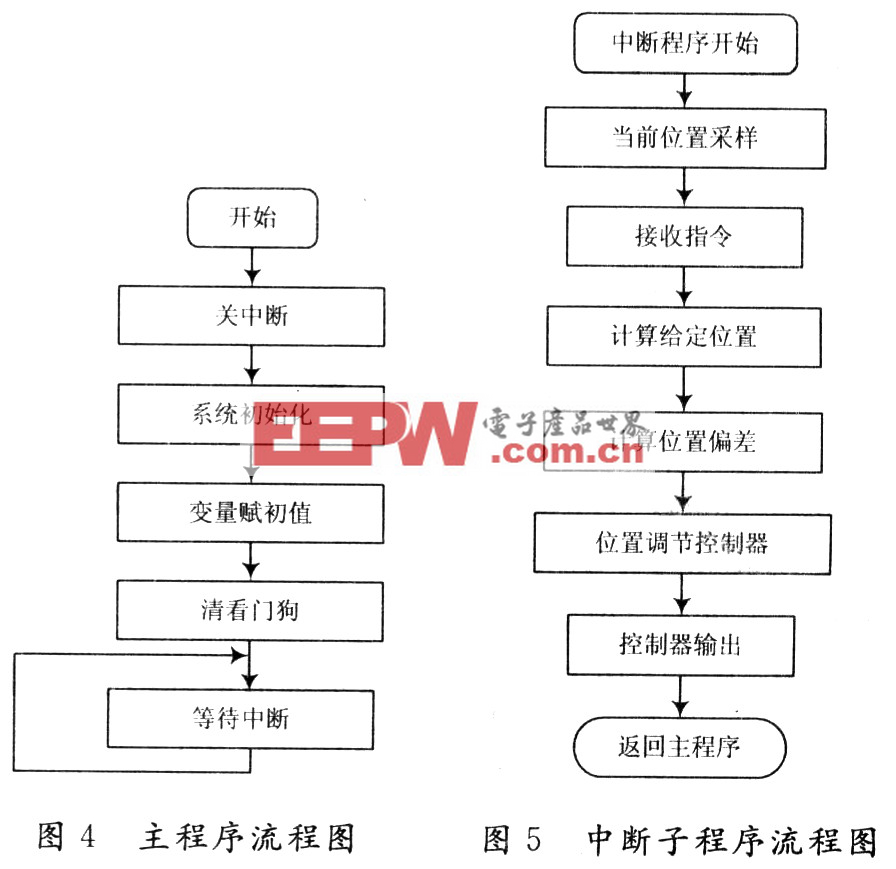
中断程序主要用来检测移动镜组当前位置,并根据上位机的控制指令给定的目标位置计算出需要调节的位置偏差,设计位置校正调节器输出PWM电机控制信号。中断程序流程图如图5所示。
位置调节控制器采用经典的PID控制算法。在进行大小视场切换时,短时间内系统有很大的位置偏差,会造成PID运算的积分积累,从而引起系统较大的超调,甚至造成系统振荡,调节时间延长。为了消除积分饱和带来的不利影响,位置调节控制器采取积分分离算法:当系统偏差较大时采用PD控制避免较大超调又可以快速减少偏差;当偏差降低到一定程度后,采用PID控制保证系统的控制精度。积分分离控制算法可表示为:
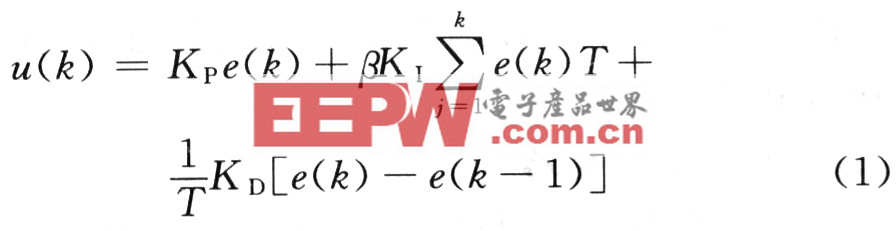
式中:T为采样时间;β为积分项的开关系数:

4 实验结果
双视场红外光学系统的工作波段为3~5μm,视场宽为24°×18°,窄视场为4°×3°,短焦焦距20 mm,长焦焦距145 mm。大小视场切换距离为125 mm,移动镜组的定位精度要求小于20/μm。
通过实验测试,调焦系统可以在1 s的时间内实现大小视场的切换,调焦精度可以达到5 μm,满足系统要求的定位精度。图6为红外光学系统分别在大、小视场下的图像。

5 结 语
介绍一种双视场红外光学镜头调焦控制系统,采用移动镜组轴向移动方式实现变焦,仅需一套机电装置即可同时实现视场变换和调焦的功能,有效地控制了轴向尺寸,使其结构更加紧凑。控制系统采用了高性能的TMS320LF2407A芯片作为系统的控制单元,使得整个硬件电路的设计简单可靠,同时强大的运算处理能力使得复杂控制算法通过编程得以实现,大大提高了控制系统的控制精度,满足了红外光学成像系统对视场切换速度快与调焦精度高的要求。






评论