一种新的变步长波束形成算法

O 引言
本文引用地址:https://www.eepw.com.cn/article/103949.htm目前,由于移动通信的飞速发展,移动用户数量的突飞猛进,这将导致有限的频谱资源被“无限”的利用,矛盾十分尖锐。如何有效地利用频谱资源是未来移动通信发展中难以回避的问题,智能天线的出现给移动通信带来了生机。它可以有效利用频谱资源,提高系统容量,是未来移动通信中必不可少的关键技术。自适应波束形成算法是智能天线研究的核心,在CDMA系统中,不同用户有不同的PN码,是否可以利用不同的PN码来实现波束赋形算法?Rong.Z等人正是基于这种思路,提出了最小二乘解扩重扩多目标阵列算法(LS-DRMTA,Least-squares Despread Respread MultitargetArray)和最小二乘解扩重扩多目标恒模阵列算法(LS-DRMTCMA,Least―squares Despread Respread MultitargetConstant Modulus Array)。这两种算法有很多优点,其代价就是增加了计算复杂度。文献在的基础上提出了DR-LMS算法,本文首先介绍了LS-DRMTCM算法,然后详细介绍了DR―LMS算法,最后根据文献中算法改进的思想提出一种新的变步长算法,最后对新算法进行了Matlab仿真。
l 信号模型
一个具有K个用户的DS-CDMA系统,接收端为具有M个阵元的均匀直线阵。假定第k个用户的功率为pk,DOA为θk,阵列响应矩阵为
假设bk、sk、tk分别表示第k个用户的信息比特、特征序列和时延。假定bk是取值为l或一l的等概率随机变量,用户k的特征序列sk可以表示为

其中,N为扩频增益,ckj为用户K的能量归一化扩频序列,取值
为持续时间为TC的矩形脉冲波形,其中Ts=NTc。对所有τk=O的情况下,也就是在同步的情况下,接收信号模型可以用下式表示

其中,t∈[1,Ts],n(t)是功率为σ2的白高斯过程。由于接收阵元的个数为M,则接收端向量可表示为

2 算法的介绍
2.1 LS-DRMTCMA和DR-LMS算法
CDMA系统中,用户的PN码是已知的。在接收端,由用户i的PN码产生的扩频信号记为ci(t),把ci(t)延迟τi后与接收信号进行相关处理,处理后再进行判决,记第n个信息比特判决结果为bin,如果判决正确,即有bin=bin,把ci(t)延时后τi再对bin进行扩频,就可以得到用户i解扩重扩后的信号ripn,它和输入信号yi(t)的硬限幅信号rcim进行加权求和来构造用户i在时间[(n一1)Tb,nTb]的发射波形ri(t),这就是LS-DRMTCM算法,其代价函数可表示为:

式中yi(h)和ri(h)分别为yi(t)和ri(t)的第h次采样。H为采样数据块,大小等于LS-DRMTEM算法中一个比特周期内的采样数。
在LS-DRMTCMA算法中,对接收信号进行了解扩频、判决、再扩频的过程,文献[2]在此基础上引进了需要参考信号的LMS算法,即在接收信号解扩重扩后,再应用LMS算法进行自适应,即把LS-DRMTCMA中的LS算法替换为LMS算法。并称其为DR―LMS算法,可描述如下

这里μ为步长,控制算法的收敛速度。一个信息比特周期开始循环时初始值设置为

2.2 改进算法
本文把DR-LMS算法修改为一种新的变步长的算法,由于算法的参考信号ri(m)是解扩重扩后生成的而不是提前给出的训练序列,因此该算法仍为盲算法,且延续了上述两种算法中利用PN码特性的优点,改进后的算法为:
算法中,μ(m)为算法的迭代步长,控制算法的收敛速度,由步长调整原则可知,在算法迭代的初始阶段,步长应较大,以便得到较大的收敛速度,而在收敛阶段,不管测量噪声多大,都应以较小的步长,以达到较低的稳态失调。eil(m)为生成的误差信号;μopt为定步长时算法收敛最快时的步长;α为调整因子,其取值范围定为0.1αR,R为算法收敛后稳态均方误差与噪声方差之比;β为平滑因子,取值范围为Oβl;σ2N为测量噪声N(n)的方差。
2.3 步长因子对算法的影响
在式(13)中,H同LS-DRMTCM算法中的H一样,为采数据样块的大小,这样式(13)求得的误差为采样数据块的平均值。由文献可知,在任意迭代阶段,输出误差的均方值必定大于测量噪声的方差,由此可知必有下式成立
在算法的初始阶段,由式(14)成立,在0.1αR时,由式(11)可知下式成立
式(18)表明在自适应算法的初始迭代阶段,本文算法能够达到定步长LMS算法在步长取值为μopt时最快的收敛速度。随着算法的逐步收敛e2(m)和σ2N越来越接近,再由条件0.1αR可知
式(17)和式(18)表明本文算法能够根据生成误差函数和噪声方差的变化而逐步改变算法的步长,使步长因子由大到小逐步变化,这样符合步长的调整原则,因此能达到较低的稳态失调。在LMS算法的收敛条件中,步长因子的取值范围应满足
式中λmax为输入信号相关矩阵的最大特征值。故由(16)和(17)式可知,本文算法收敛的前提条件是
2.4 α和β对算法性能的影响
参数α和β的不同选择可以影响算法的收敛速度和稳态失调。这里,参数a的值是通过试验的方法来确定的,首先给定一α值,比如α=0.5,这样就能得到一条学习曲线,然后逐渐改变α值,以得到一组学习曲线,选择收敛效果最好的一条曲线来确定α值。由式(13)可知,当α较小时算法的收敛速度较快,但平稳性较差,而α较大时,算法的收敛速度变慢。因此,可以选择适当的α值,使算法既获得较快的收敛速度同时又有比较低的稳态失调。β的作用是对步长因子起平滑作用,如果曲线上相邻个点波动较大,应该选择较大的β值,反之,应选择较小的值。这样就能够因eil(m)波动较大使得步长因子μ(m)波动也较大,从而实现较好的收敛性能。
3 仿真结果
假设在高斯白噪声信道中,基站天线为8阵元的等间隔直线阵列;阵元间隔为半个载波波长,信噪比为15dB;信干噪比为10dB;扩频因子为3l;期望信号入射角为30°,干扰方向为一50°,迭代次数为1000次。
3.1 收敛性能
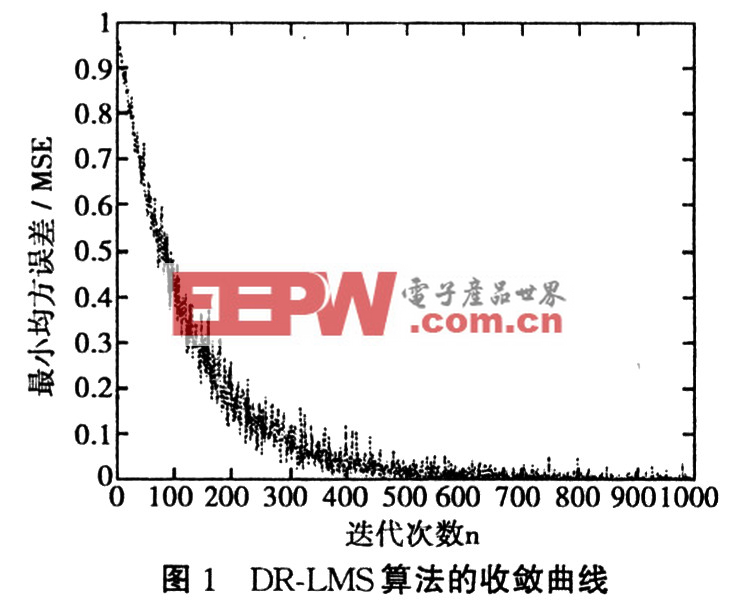
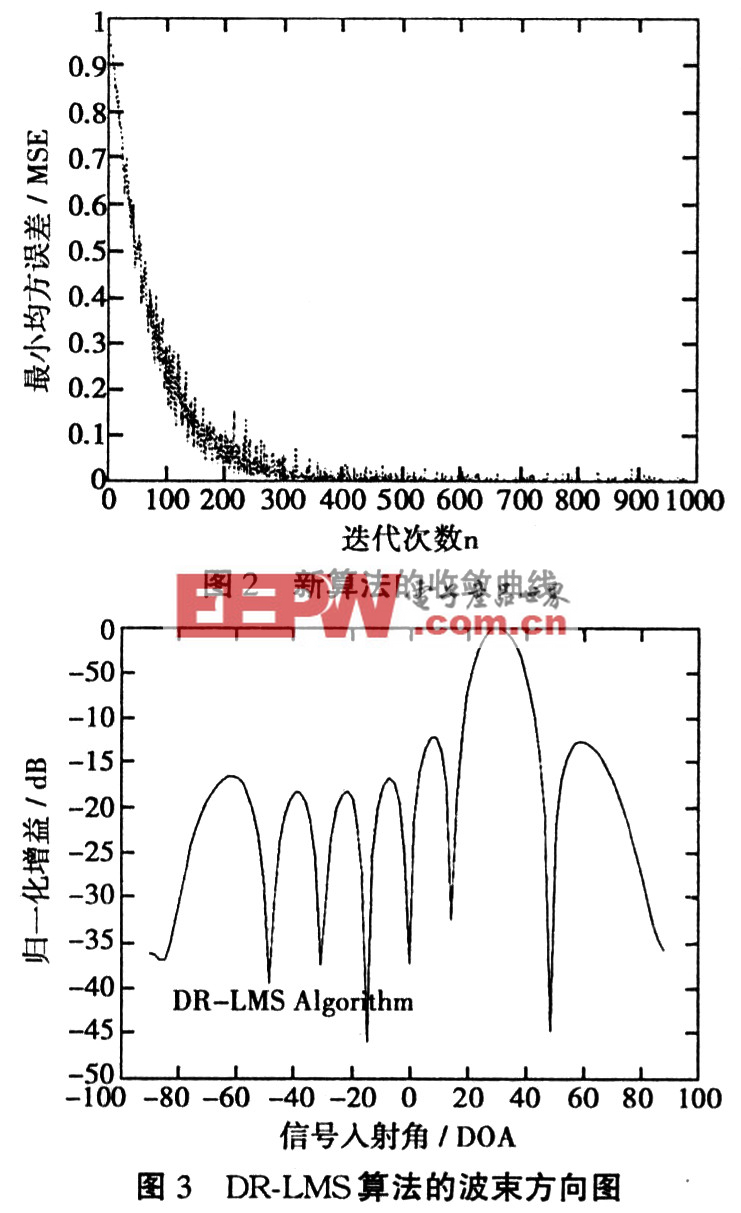
DR―LMS算法和新算法在一个比特周期的时间上所有采样只计算一个加权向量。图l和图2为两种算法的收敛曲线,在DR―LMS算法中迭代步长设为μ=O.000045,在新算法中,设α=0.8,β=0.2,同样令起始步长μopt=0.000045。从两种算法的收敛曲线上可以看出:在同样条件下,DR―LMS算法在迭代大约500次的时候就可以收敛,而本文提出的算法只需迭代300次左右就可以收敛,收敛速度明显好于文献中提到的算法。
3.2 波束图
从图3和图4可见,文献中DR―LMS算法和本文所提出的算法都可以很好的在期望方向形成波束图,对干扰方向信号的抑制也比较明显。
3.3 算法复杂度的比较
文献中LS-DRMTCM算法的复杂度为H(2M2+M),其中H为采样数据块的大小,M为阵列天线的阵元个数。在文献中,DR―LMS算法的复杂度为2HM,本文所提出的算法,在DR―LMS算法基础上加入了变步长,但这没有增加算法的复杂度,本文算法中步长并不包含任何指数运算,计算很简单,只需极少的乘法运算,因此计算复杂度较低,和DR―LMS算法计算量大体相当。
4 小结
本文以移动通信中智能天线技术为研究背景,研究了基于码滤波的盲自适应波束形成算法,文献在Rong等人提出LS-DRMTCM算法的基础上提出了DR―LMS算法,本文在这一思路的引导下对DR―LMS算法作了进一步改进,引入了变步长算法。通过仿真比较,在跟踪性能上和文献中所提到的算法相当,但在收敛性能上却有明显的提高。







评论