实现ARM+ROS(机器人操作系统)之运行ROS!

如何低成本搭建ARM+ROS的硬件载体?上文展示ROS部署前的筹备工作及步骤分解,本文将为大家演示ROS的移植及测试方法。
经过前面的环境搭建,HDG2L-IoT评估套件已经能稳定地运行Ubuntu+docker环境,当前需要下载运行ROS镜像即可。
本文参考ROS官方文档《Getting started with ROS and Docker》,结合我司的HDG2L-IoT评估套件实现ROS方案完全搭建流程,参考****如下所示。

目前docker官网提供了搭建好的ROS镜像(支持arm64架构),****为:

如下所示。
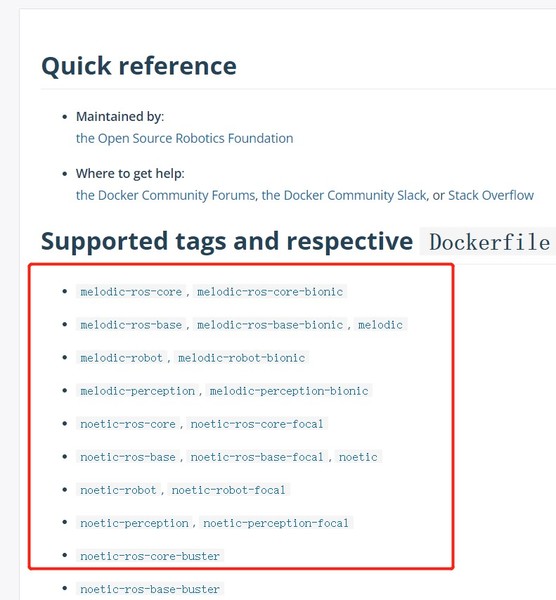
下载命令如下所示,<tags>填入上图的字符串。

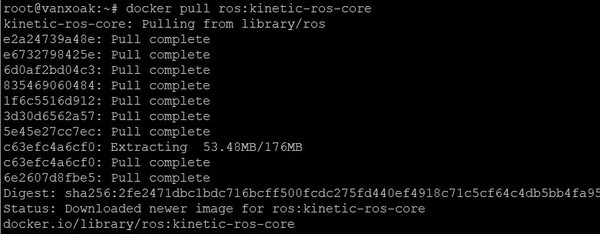
根据项目需求选择合适的ROS镜像,本例以kinetic-ros-core为例,下载命令如下所示。

下载完成如下图所示:
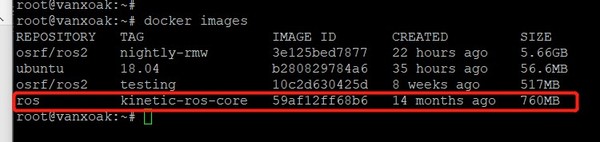
查看镜像的命令:

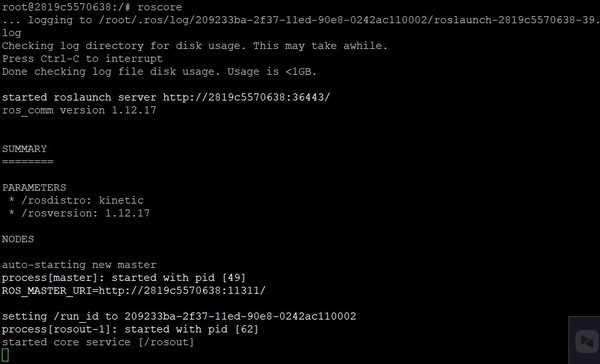
使用下载下来的ROS镜像来启动容器,命令如下所示。

以终端模式进入ROS容器。
进入后运行roscore来启动运行ros节点必要的ROS Master和ROS parameter,运行情况如下所示。
至此,我们通过三篇文章从硬件与底层、环境搭建、ROS运行等方面为大家介绍了一个全新的ARM+ROS的软硬件实现方案。文章中若有不明之处或需要技术问题交流请随时联系万象奥科官方。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
关键词:
ROS
ARM
机器人
相关推荐
无人考古机器人电路图
最新ARM技术和嵌入式技术发展动态 下
黑芝麻智能推出 SesameX 多维具身智能计算平台
本站成立e-ARM开发工作室!
魏哲家谈机器人:核心还是半导体
Arm重磅推出AGI CPU 1OU 双节点参考服务器
ARM开发详解
ARM嵌入式软件编程经验谈
台积电魏哲家「机器人论战」延烧 美中龙头筹码大不同
英飞凌携手 NVIDIA ,依托数字孪生技术加速部署安全可靠的机器人
Arm AGI CPU:智能体式人工智能云时代的芯片基石
AI 检测工具为机器人车队提供安全认证
ARM嵌入式系统开发
WinCE+ARM开发及关键技术 下
最新ARM技术和嵌入式技术发展动态 中
机器人实时远程控制系统及其开发库的设计与实现
自平衡机器人电路图
RTL8201L缺货,xiaohua,E-ARM你们买得到吗?
自攀爬幕墙清洗机器人控制系统设计
e-ARM的PCB板已经做好,s3c4510b很快买到
arm学习资料
智能搏击训练机器人电路图
今日上传e-ARM全部文档至本站下载区
地平线HSD引领智能驾驶普惠新时代
ARM 展示小型低功耗上网本样品
从互连工程到生态协同:TE Connectivity在机器人产业链的双重角色
WinCE+ARM开发及关键技术 上
咱们的e-Arm进行的咋样了?板子画了吗?
英伟达 “全天候” 芯片实现毫秒级人脸检测
ARM嵌入式系统开发:软件设计与优化