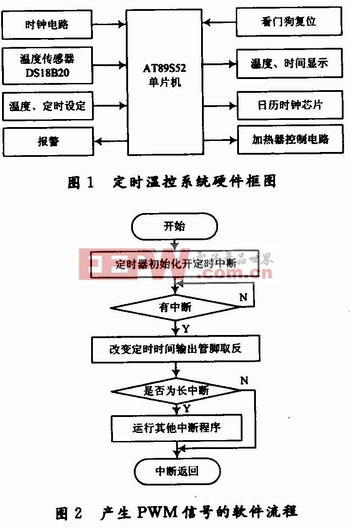
- 在实现定时温控系统的基础上,为实现对温度的精确控制,提出根据温度传感器DSl8B20的感温原理,利用AT89S52的定时器实现脉宽调制(PWM)功能,采用数字PID控制,讨论了一种恒温控制的数字PID控制算法,并通过C51程序实现了单片机的控制系统。使用结果表明,该系统具有控制效果好,精度高,超调量小等优点,且各项性能指标均符合要求。
- 关键字:
系统 应用 温控 算法 PID 控制 数字
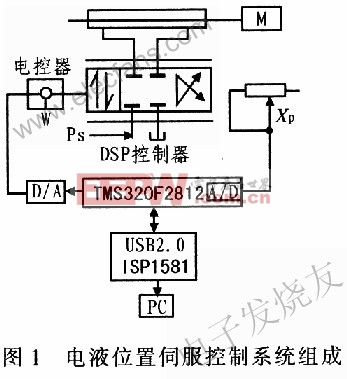
- 电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。 常规PID控制器具有结构简单、参数
- 关键字:
DSP 实现 控制系统 位置 控制器 NNC-PID
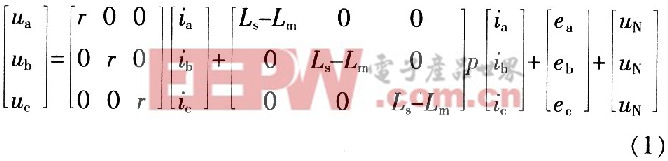
- 为抑制无刷直流电动机的高度非线性和大量随机扰动,根据模糊优化的PID控制方法设计多变量的无刷直流电机(BLDCM)的控制方案。该控制方案采用模糊算法在线自动整定传统的PID参数,可用来设计多自由度机器人手臂关节控制器。详细阐述系统的组成和运行模式。实验结果表明,该控制方案使系统的响应时间和以前相比缩短50%,超调量降低5%,转矩扰动减小30%,更能有效地提高系统控制的精确度、柔韧性和鲁棒性。
- 关键字:
电机 控制 直流 PID 模糊 优化 基于
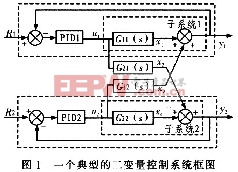
- 现代工业过程中面临越来越多的结构复杂的多变量系统,传统的单变量PID控制方法已无法满足要求,为了解决多变量系统的控制问题,以两输入两输出系统为例,提出一种基于阶跃响应的多变量频域模型辨识方法,并将此种方法与对角矩阵解耦控制方法相结合应用于多变量PID控制系统中。最后对滞后环节近似部分和对角矩阵解耦方法进行仿真验证。结果表明该方法能够更好的控制系统变量,误差减小50%以上。
- 关键字:
解耦 控制 研究 PID 及其 系统 辨识 变量

- 研究普通PID数字控制器在PLC控制系统中的应用,结果表明该算法容易产生误差积累,从而使得超调量过大,在此基础上提出增量式PID控制算法。阐述基于三菱FX2N增量式PID控制器设计方法,给出了增量式PID控制算法程序流程图和部分程序。实验结果表明,该控制算法既有利于改善系统的动态特性又有利于消除静差,比普通的PID控制具有更好的控制品质。
- 关键字:
控制器 设计 PID 增量 三菱 FX2N 基于
- 各种智能型数字显示调节仪,一般都具有PID参数自整定功能。仪表在初次使用时,可通过自整定确定系统的最佳P、I、D调节参数,实现理想的调节控制。在自整定启动前,因为系统在不同设定值下整定的参数值不完全相同,应
- 关键字:
PID 数字显示 调节仪 参数
- 归一化互相关算法因其图像匹配稳定性高的特点被广泛应用于SAR成像和红外成像的制导系统中。为增强其应用的实时性,讨论一种基于TS201处理器,在保证全图遍历条件下,结合处理器的自身特性,采用递推与多模板思想构建的归一化互相关快速算法。实验证明,该执行效率常规算法的实现方案有了很大提高,可以实现低对比度条件下的目标精确匹配。
- 关键字:
201 TS 快速算法
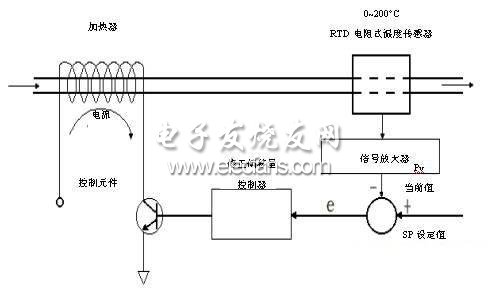
- 针对在工业生产过程中经常需要高稳定度的恒温环境,传统模拟式仪表结合简单的PID控制较难达到目标的情况,提出了基于数字PID控制算法和89C52单片机的温度控制系统。该系统通过温度传感器DSl820对温度进行采样和转换,然后执行数字PID控制,输出控制量来调节可控硅触发端的通断,从而实现对温度的控制。水温可以在一定范围内由人工设定,并能在环境温度降低时实现自动调整。结果表明:通过将数字PID算法和89C52单片机结合使用,使整个控制系统的温度控制精度提高了10%,输出温度的误差小于2%,不仅满足了对温度控制
- 关键字:
温度 控制系统 单片机 89C52 数字 PID 基于 收发器
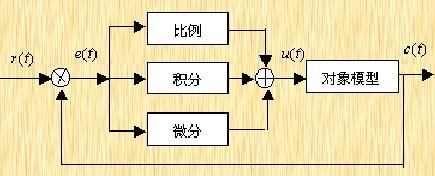
- 电路的功能若对温度进行控制并要求以最短的时间达到规定的温度时,可在普通比例控制电路上加上对误差进行积分的电路,但这样会随时间的增加而扩大,面具响应也慢,为了减少误差,提高速度,在电路中再加上微分元件,
- 关键字:
PID OP放大器 温度 电路

- 神经网络PID控制器实现了两种算法本质的结合,借助于神经网络的自学习,自组织能力,可实现PID参数的在线调整,控制器自适应性好;该算法不要求被控对象有精确的数学模型,扩大了应用范围,控制效果良好;在合理选择神经网络的结构的情况下,该算法有很强的泛化能力。基于以上优点,神经网络PID控制器具有很好的发展应用前景。
- 关键字:
控制器 仿真 PID 神经网络 BP 基于
- 本文给出了一种基于TS201的多DSP并行系统方案实例。事实上,在多并行系统的设计中,采用网状松耦网络结构可使网络管理更容易,同时也可方便地利用DMA传输来将多路信息集中在同一个节点进行运算。其对称结构也可使配套程序简单化,还可使多个节点重复利用。因此,本文可以作为设计多DSP并行系统的一种参考。
- 关键字:
201 DSP TS 系统设计
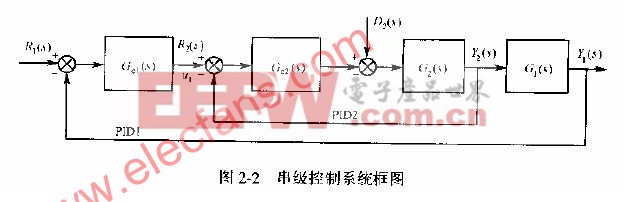
- 串级计算机控制系统的典型结构如下图所示,系统中有两个PID控制器,Gc2(s)称为副调节器传递函数,包围Gc2(s)的内环称为副回路。Gc1(s)称为主调节器传递函数,包围Gc1(s)的外环称为主回咱。主调节器的输出控制量u1作为
- 关键字:
原理 控制 PID 串级
- 前言
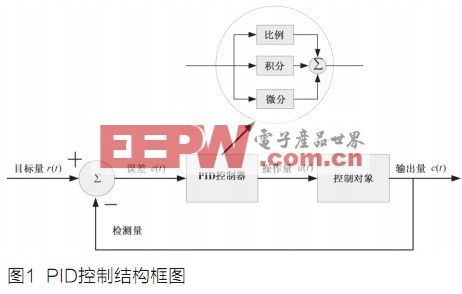
数字PID控制在生产过程中是一种最普遍采用的控制方法,其特点是结构简单,稳定性好,工作可靠,调整方便,多被应用到被控对象的结构和参数不能完全掌握或得不到精确数学模型的环境中。将数字PID控制算法应用于基站发射功率控制,可以极大地提高基站发射功率的稳定性和可靠性,控制输出功率在覆盖允许范围内,不至过小无法满足网络规划时的覆盖距离要求,而减少小区覆盖范围,又不会产生过强的输出信号对相邻基站造成干扰。本文首先分析数字PID控制算法中的两种常见算法,而后重点讨论它们在基于ADUC7026的基站功率
- 关键字:
ADI 基站 PID
ts-pid介绍
您好,目前还没有人创建词条ts-pid!
欢迎您创建该词条,阐述对ts-pid的理解,并与今后在此搜索ts-pid的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473