网易科技讯 7月23日消息,据国外媒体报道,自俄罗斯黑客阿莱克斯·鲍罗丁(Alexey Borodin)发现iOS应用商店应用内购买的漏洞后,苹果做出一系列迅速反映,包括关闭托管服务器、禁止IP地址并在iOS 6中添加新的保护措施等,成功地解决了这一漏洞。
鲍罗丁在其博客中表示,在检查苹果应用内购买的新保护措施——包括共享私有应用程序接口后,已经没有办法绕过更新后的应用程序接口,承认“这一游戏已结束”。
尽管在过去两周内,鲍罗丁
关键字:
苹果 iOS 6
网易科技讯 7月22日消息,据国外媒体报道,浏览器厂商Opera Software的最新移动广告调查报告显示,在2012年第二季度,苹果iOS是最有效的移动广告平台,iOS设备的平均每千次展示费用(eCPM)达2.85美元,高于谷歌Android设备的2.1美元。
RIM的黑莓和诺基亚的Symbian则远远落后于iOS和Android平台,它们的eCPM分别为0.64美元和0.59美元。知名平台当中,排在末席的是微软的Windows Phone,其eCPM仅为0.2美元。基于Java的J2ME平
关键字:
iOS Android
网易科技讯 7月22日消息,据国外媒体报道,Facebook今日宣布收购iOS应用开发商Acrylic Software。后者曾开发了一款Mac以及iPad流行应用,帮助用户整合RSS阅读应用。
此次收购的细节并未公布。据推测,该公司在iOS应用开发方面的才能,引起了Facebook的兴趣。Acrylic Software的开发团队将于未来几周内加入Facebook位于旧金山的设计团队,而包括报纸程序Pulp以及安全数据库应用Wallet的公司旗下应用将不会被Facebook收购。公司创始人达斯
关键字:
Facebook iOS
7月18日消息,据美国科技博客TechCrunch报道,全球移动广告平台Adfonic今日公布的研究数据显示,第二季度安卓(Android)占该网络全球移动广告印象数的大部分份额,约为46%,高于iOS 34%的份额。这是安卓第一次在Adfonic平台上的受欢迎程度超过iOS。事实上,其它大型广告网络例如Millennial Media和InMobi,今年早些时候都已表示谷歌操作系统的受欢迎程度已超越苹果的操作系统。
Adfonic这份全球广告衡量报告是基于每月为三星、华纳兄弟、eB
关键字:
谷歌 Android iOS
如果你是一个Canon imageRUNNER或者高级imageRUNNER多功能系统用户,那今天就是你的幸运日。现在你可以轻松地使用你的黑莓手机或者iOS设备扫描之后执行上述任务。
这就多亏了佳能的“Direct Print and Scan for Mobile”应用。人们可以简单地使用自己的移动设备扫描或者打印,比如黑莓手机或者iOS设备。这份声明只提及了针对黑莓手机和一些相关周边,没有任何语句表明Android设备也会给与同等待遇。
有兴趣的话请移步佳能官网
关键字:
黑莓 iOS Android
英国著名的付费电视频道供应商天空电视台明天将启动众望所归的Now TV,一个结合了电影,体育赛事,以及电视频道的综合电视流服务。这项新服务不仅可以提供按次计费或者点播的电影,而且将允许非天空用户从PC,Mac,智能手机,平板电脑,智能电视以及YouView上订阅“丰富的天空电视台频道和付费节目”。该公司同时也将启动对Xbox 360,Playstation 3和Roku用户的服务。
这项服务同时也被授权直播各种体育赛事包括英超和欧洲杯在内的足球
关键字:
Now TV Android iOS
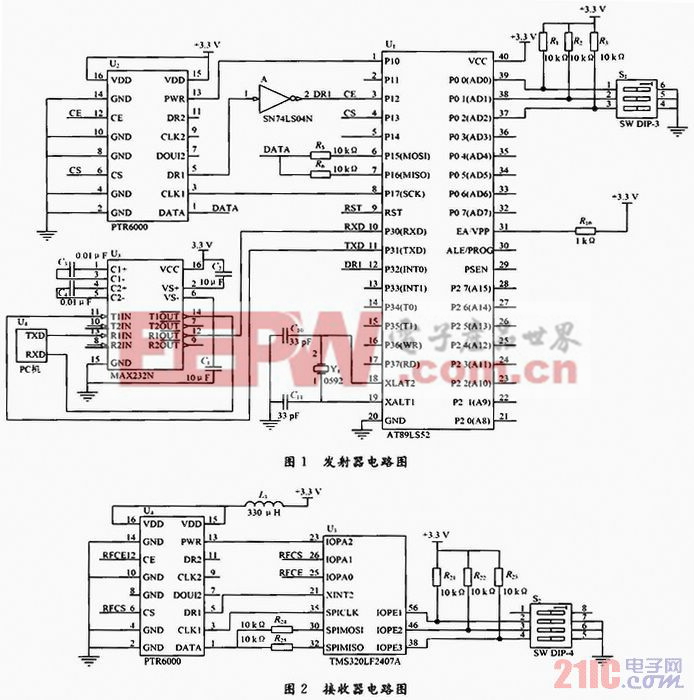
摘要:无线通信系统是足球机器人闭环控制系统的一个重要组成部分,上位机与机器人小车的通信通过无线通信模块来实现。提出一种基于PTR6000的足球机器人无线通信系统方案,包括发射器和接收器的硬件和软件的设计及实现
关键字:
系统 设计 无线通信 机器人 PTR6000 足球 基于
新浪科技讯 北京时间7月14日早间消息,一位俄罗斯开发者已破解了苹果iOS应用内购买机制,让用户们可以免费下载他们想要的任何内容。
根据这种破解方法,iPhone、iPad和iPod touch用户可以绕过iOS应用内购买机制,免费下载数字游戏及其他内容,还能升级到应用的完整版本。更为重要的是,这种办法不需要用户对他们的iOS设备进行“越狱”,而是采用了一种被称作“应用内代理”(in-app proxy)的技术。
据报道,这项技术可以破解运行
关键字:
iPhone iOS
中广网北京7月9日消息(记者王浩 实习记者华岸)据经济之声报道,在移动互联网创新大会上最新发布的一组数据揭开了中国移动互联网产业的现实与无奈—— 在整个iOS市场中,中国区APP下载量排名全球第2,但收入只排到全球第8,中国平均下载收入只有0.03美元,是美国用户的十分之一,甚至只有越南的 一半。
一边是蓬勃发展的移动互联网产业,一边是少得可怜的收入。在iOS收入排名前10位的发行商中,中国区贡献的收入只占1.53%,即使是全球最大的iOS开发公司在中国也很难产生收入。
关键字:
iOS APP
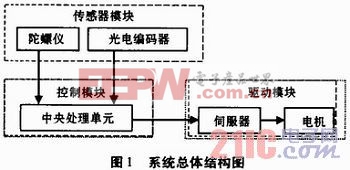
摘要:为实现移动式机器人的智能工作,研究了航迹推算定位技术,采用陀螺仪、光电编码器等传感器对已知航线的机器人进行行走定位。系统由驱动模块、传感器和反馈模块以及控制模块等组成,其模块化设计充分整合了系统
关键字:
定位 系统 设计 机器人 移动式 航迹 推算 基于
在本周的“app-ocalypse”更新中,苹果公司表示已经修复了导致iOS和Mac启动应用程序后崩溃的Bug,推出了新的更新包来替代导致崩溃的应用。对于此次事件中给开发者带来影响的大量一星评级,苹果公司并没有进行删除,而只是不算入平均评级中。
但是在开发者眼里,他们更担心在于如何处理那些自己没有什么过错、却因为这次事故而获得大量一星评级带来的影响。
据一些开发者说,他们的一星评级其实并没有从iTunes App Store中删除,而只是在显示时被隐蔽了起来,不过这
关键字:
App Store iOS Mac
HTML5或将成为未来移动互联网时代的颠覆者。
5年前,当第一台iPhone诞生时,乔布斯断然拒绝了FlashPlayer,而选择HTML5(新型网页标准)取代Flash的功能。他曾预言,“虽然现阶段原生应用给了用户很好的体验,但基于网页的应用才能代表未来。”
6月28日,Adobe宣布将FlashPlayer全面从Google商店撤出,转攻HTML5;与此同时,由Mozila开发的基于HTML5的智能手机操作系统FirefoxOS也正式发布。
有业内人士向
关键字:
HTML5 iOS 安卓
苹果拥有iOS系统,并且成功建立了生态系统,其AppStore的应用已经突破65万个,下载次数超过300亿次。iPhone、iPad是苹果的软硬件融合的典范。
谷歌的Andriod是目前领先的移动生态系统,应用已经突破60万个,下载次数达到200亿次。由于该系统保持开放,发展势头凶猛,但过度的开放,已经让生态系统中出现了混乱。Nexus7平板、NexusQ播放器、谷歌眼镜的发布,让外界感到耳目一新。
微软在软硬件一体化上也有过成功案例,那就是Xbox游戏机及体感装备Kinect。现在微软却
关键字:
苹果 iOS
这是一个简单到令人发指的仿生避障机器人,仅由电池、开关、马达组成最基础的电学电路,就能表现出类似自然界生物的智能!在遇到障碍物时会掉头,看起来有 点象一只疯狂的小强。只要有基本的物理电学基础就可以自
关键字:
机器人 制作 仿生 电路 电学 基础
美国科技博客The Verge今天刊文称,免费游戏模式和社交游戏网络的发展正在改变移动游戏市场,而通过推出传统的游戏控制器,苹果将可以对游戏主机厂商形成极大压力。以下为文章全文:
4年前,苹果推出了App Store应用商店,这永久性地改变了移动游戏市场。在苹果取得成功之后,其他多家公司开始效仿。
目前, 苹果iOS已不再是市场中唯一具有竞争力的平台。几乎所有手机用户,无论他们使用Android、iOS还是黑莓系统,都曾在手机上玩过游戏。毫无疑问移 动游戏正在快速发展,每一年市场上都会出现
关键字:
苹果 iOS Android
ios 机器人介绍
您好,目前还没有人创建词条ios 机器人!
欢迎您创建该词条,阐述对ios 机器人的理解,并与今后在此搜索ios 机器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473