- 在锂电池生产中的生产过程中,要把成品从生产线上自动取下来,送到检测处通过智能图像处理系统进行外观检验...
- 关键字:
锂电池 机器人 零件检测
- 摘 要: 介绍了机器人中以8031为核心的示教盒系统的硬件结构和软件设计。
- 关键字:
机器人 示教盒 串行通讯
- 日本远程实时转播机器人裸眼3D手术,日本信息通信研究机构(NICT)和日本Ultra-Realistic Communications Forum(URCF)于2012年2月15进行传输裸眼3D手术影像的实证实验,远程实时转播美国Intuitive Surgical公司“da Vinci”手术辅助机器人的
- 关键字:
日本 机器人 裸眼3D 远程
- 当代机器人研究的领域已经从结构环境下的定点作业中走出来,向非结构环境下的自主作业方面发展。而机器人灵巧手相当于安装在机器人臂上的可独立实现精细操作运动的一组机器人,是真正拟人化并能实现灵活操作的机器人
- 关键字:
控制系统 设计 巧手 机器人 PIC 单片机 基于
- 摘要:利用51系列单片微型计算机实现洗浴服务机器人控制系统的设计。以单片机芯片AT89C51作为核心控制器,通过硬件电路设计及软件程序编制,设计洗浴服务机器人完成洗浴过程的控制系统。洗浴控制系统通过对温度控制、
- 关键字:
控制系统 设计 机器人 服务 实现 洗浴 单片机

- 前言
感谢您付出宝贵的才华与时间来开发iOS应用程程序。从职业与报酬的角度而言,这对于成千上万的开发员来说一直都是一项值得投入的 事业。我们希望帮助您加入这个成功的组织。这是我们首次发布《应用程序商店评估指导》(App Store Review Guidelines)。通过它,我们希望帮助您解决开发应用程序时遇到的问题,以便于您在提交应用程序时,可以加快审批流程的速度。
我们将应用程序(Apps)视为与书籍或歌曲不同的产品,我们并不存储它们。如果您意欲批评宗教,那就去写本书。如果您想要描述
- 关键字:
苹果 IOS
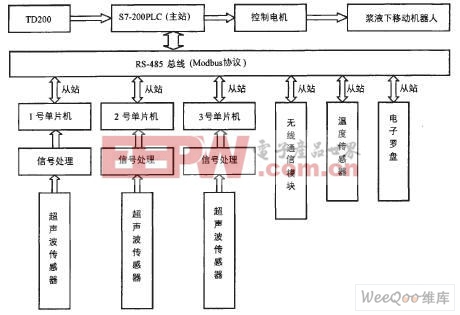
- 摘要:结合浆液下移动机器人系统的功能要求及PLC的特点,构建了桨液下移动机器人的控制系统。为提高该机器人系统的经济效益和实用性,简化机器人控制系统,以西门子PLC为主控制器构成整个机器人的控制网络。对网络通信,电机控制的关键技术进行了探讨,并完成了整个控制系统的软件程序设计。该系统的实现对于研究以PLC控制移动机器人的相关技术具有指导意义。
- 关键字:
控制系统 设计 机器人 移动 PLC 浆液 基于
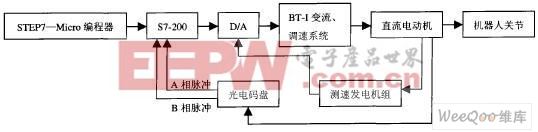
- 利用可编程控制器(PLC)控制系统的高可靠性、编程及维护方便、体积小的特点,将其应用于环流可逆调速系统中,研制出基于PLC的工业机器人关节直流伺服系统,通过环流可逆调速系统控制电机的正反转, 实现对工业机器人关节的伺服控制。其优点是在改变电机正反转时无需改变线路结构,使工业机器人关节的伺服控制更简单、可靠和稳定。
- 关键字:
直流 伺服系统 关节 机器人 PLC 工业 基于
- 摘要:针对基于光电传感器组寻迹的自动导引机器人,设计了传感器阵列的布置方式。根据此布置方式,提出了三个处理 ...
- 关键字:
机器人 寻迹算法 规则
- 本文设计了一种基于摩托罗拉MC68HC08系列单片机的机器人追跑控制系统,用于研究机器人之间的简单互动。
移动机器人行为描述
在此系统中,我们将两个移动机器人一个命名为“猫”,一个命名为
- 关键字:
控制系统 设计 机器人 应用 系列 单片机 MC68HC08
- 摘要: 本设计基于单片机及多种传感器,完成了一个自主式移动机器人的制作。单片机作为系统检测和控制的核心,实 ...
- 关键字:
单片机 机器人 传感器
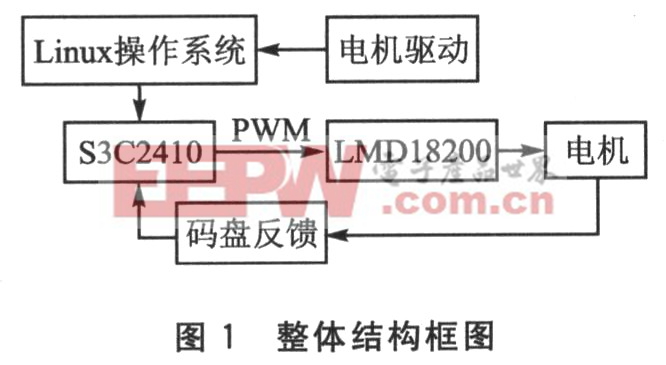
- 解析ARM9和Linux在机器人控制系统的应用,引 言现有智能机器人用直流电机作为驱动轮时一般都是用单片机或者高速的DSP等进行控制,智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”。在脑中起作用的是中央计算机,这种计算机跟操作它
- 关键字:
控制系统 应用 机器人 Linux ARM9 解析
- 北京时间12月30日晚间消息,调研公司StatCounter数据显示,塞班仍然是2011年全球使用最为广泛的移动操作系统。
StatCounter数据显示,今年1月份塞班全球市场为30.25%,而12月份增至33.59%。整体而言,塞班市场份额呈上扬趋势,尤其是最后两个月表现强劲。
在移动市场,苹果赢得了巨额利润。但在市场份额方面,iOS今年的表现基本持平。1月份全球份额为25.02%,12月份降至22.56
- 关键字:
塞班 iOS
ios 机器人介绍
您好,目前还没有人创建词条ios 机器人!
欢迎您创建该词条,阐述对ios 机器人的理解,并与今后在此搜索ios 机器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



