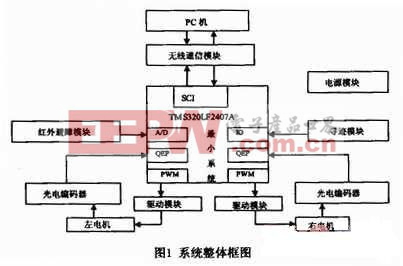
- TMS320LF2407A实现教育机器人硬件平台,引言 智能机器人作为一个高新科技的综合体,直接反应了一个国家信息技术的发展水平,受到了社会各界的高度重视。智能机器人涉及了信息技术的几乎所用内容,可以让学生接触并看到信息技术的全景,并且智能机器人是
- 关键字:
硬件 平台 机器人 教育 实现 TMS320LF2407A
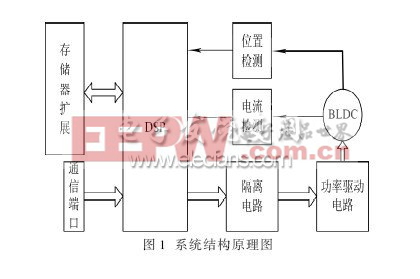
- 基于DSP的覆冰机器人控制系统研究,DSP(digital signal processor)是一种独特的微处理器,是以数字信号来处理大量信息的器件。其工作原理是接收模拟信号,转换为0或1的数字信号。再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译
- 关键字:
研究 控制系统 机器人 DSP 基于

- 摘要:针对农田精细化管理的目的,采用了GIS技术、空间数据处理、WiFi、ARM、苹果公司iOS等技术。建立土壤温度、湿度、光照强度、光合有效辐射、风向风速、雨量等数据采集系统,可对采集数据进行分析处理和数据模型建
- 关键字:
数据 监控 设计 农田 变量 iOS 便携式 基于
- 北京时间9月14日早间消息,有报道称,苹果已通知AppleCare客服部门,从10月10日开始,与iOS相关的客户咨询将会出现大幅上升。这或许意味着苹果将于10月10日正式发布iOS 5系统。
- 关键字:
ios iPhone
- 摘要:主要介绍以STC12C5A60S2单片机为核心的教育机器人设计,阐述了教育机器人的硬件电路设计、软件模块以及控制算法设计。系统设计的红外光电检测阵列和模糊自整定PID控制器,使教育机器人在行走时更平稳,且控制方
- 关键字:
设计 实现 机器人 教育 STC12C5A60S2 基于
- 摘要:设计了一种简单的基于单片机的智能救援机器人小车,设计简单,易于实现,通过现场演示,我们的设计取得了不错的结果。
关键词:单片机;智能救援;机器人小车
0 引言
近几年地震灾害频频发生,危害
- 关键字:
小车 设计 机器人 救援 单片机 智能 基于
- 引言 智能寻迹机器人是一种被广泛研究的机器人,而且国内外都有许多重要的比赛都以寻迹机器人为核心 ...
- 关键字:
AT89C52 机器人 自主寻迹

- 吸尘机器人作为服务机器人领域的一个新产品,结合了机器人和吸尘器技术,能在无人看守情况下轻松地完成室内环境的吸尘等清洁工作,越来越受到人们的欢迎。
其结合了机器人和吸尘器的核心技术,能在无人看守情
- 关键字:
方案 设计 机器人 吸尘 智能
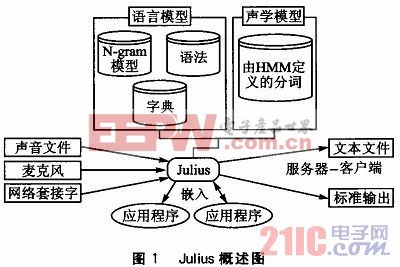
- 摘要:随着机器人技术不断发展,本文提出机器人的语音识别这一智能人机交互方式。在研究了基于HMM语音识别基本原理的情况下,在实验室的机器人平台上,利用HTK和Julius开源平台,构建了一个孤立词的语音识别系统。利
- 关键字:
系统 构建 识别 语音 Julius 机器人 基于
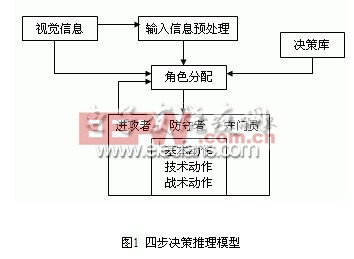
- ⒈ 引言 目前,有关机器人足球比赛的国际组织有两个:RoboCup联合会和FIRA组织。比赛项有三个:(1)、小型机器人比赛(Фle;15cm);(2)、中型机器人比赛(15cmФle;50cm);(3)、电脑模拟比赛。在仿真设计中涉及到很
- 关键字:
比赛 对策 研究 仿真 足球 VB 语言 机器人 基于
- 国外媒体报道,分析师对谷歌斥资125亿美元收购摩托罗拉移动的交易对Android和苹果iOS竞争格局的影响的看法并不完全相同。
券商Ticonderoga Securities分析师布赖恩·怀特(Brian White)周一在接受采访时表示,谷歌此举表明它需要模仿苹果完全控制iOS平台的策略,“IT产业内有一种趋势:同时控制硬件和软件,谷歌收购摩托罗拉移动表明它认可苹果在使用的这种模式”。
- 关键字:
谷歌 智能手机 iOS
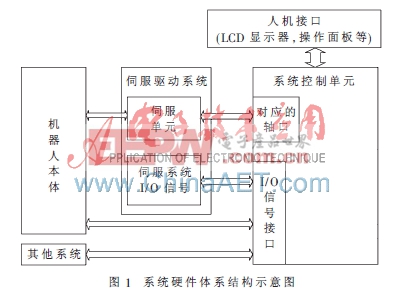
- 根据浇铸机器人的功能需求和特点,设计了具有良好通用性和开放性的工业机器人浇铸控制系统的软硬件结构。以三轴浇铸机器人为应用实例,分析了其运动学正逆解算法,并根据实际生产需求,通过PLC程序中定义的M指令实现整个浇铸系统的I/O信号交互控制。实际应用结果表明,该浇铸控制系统有效地提高了浇铸生产效率,并且运行稳定可靠。
- 关键字:
设计 应用 控制系统 浇铸 机器人 工业

- 7月18日消息,据国外媒体报道,AppleInsider网站报道了传言中的苹果iOS 5操作系统中的语音控制系统的工作情况。
- 关键字:
ipad ios
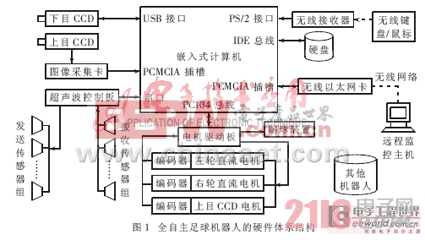
- 足球运动是一种大家非常喜爱的运动。让机器人去踢足球,听起来像天方夜谭似的。机器人也能去踢足球? 而且,还是要组成一个队伍,不同的机器人要互相配合?要知道,机器人要参加比赛必须要有自己的眼睛,自己的双腿,
- 关键字:
设计 实现 体系结构 机器人 足球 自主
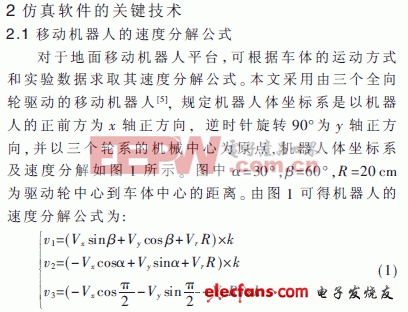
- 在机器人技术研究中,为了提高机器人控制算法的开发效率,提出移动机器人三维仿真软件的设计方案并加以实现。该软件采用ODE物理引擎生成动力学世界和实现碰撞检测,提高了仿真速度和精确度,同时采用OpenGL绘制三维图
- 关键字:
软件 设计 仿真 3D 机器人 移动
ios 机器人介绍
您好,目前还没有人创建词条ios 机器人!
欢迎您创建该词条,阐述对ios 机器人的理解,并与今后在此搜索ios 机器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



