- 来自瑞士苏黎世机器人与智能系统研究所,MichaelKummer的小组共同研究出这个一看就蛋疼眼疼的玩意。...
- 关键字:
机器人 医疗 投放药物 精确定位
- 据零件供应商表示,富士康受日本地震的影响,供应不足,势必阻碍苹果今年春的出货计划。据悉,富士康在成都的工厂生产的零件大部分用于iPad2,但由于地震影响了原材料的供应,加上工厂的工人数量有限,FSK可能无法完成750-900万iPad的生产目标。
- 关键字:
苹果 iOS
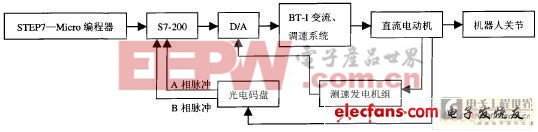
- 1 引 言 目前,工业机器人关节主要是采用交流伺服系统进行控制,本研究将技术成熟、编程方便、可靠性高、体积小的SIEMENS S-200可编程控制器 ,应用于可控环流可逆调系统,研制出机器人关节直流伺服系统,用以对工
- 关键字:
控制系统 伺服 机器人 PLC 基于
- 达芬奇手术机器人系统,腹腔镜手术是一类外科手术,在手术过程中将一个长柄器械通过小切口插入患者体内需要动手术的目标部位。与传统的开放式手术相比,腹腔镜手术能缩短恢复时间、痛苦小、粘连少,使病人在术后能拥有更好的生活质量。但是
- 关键字:
达芬奇 机器人 系统
- iOS设备的AppStore孕育着许多美观的应用程序。iPhone和iPad的应用以设计美观操作简洁而著称。如今,许多iPho...
- 关键字:
iOS Android
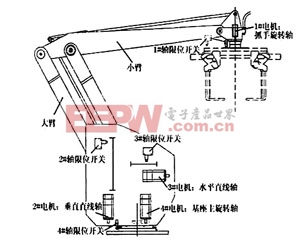
- 目前在用的工业码垛机器人种类繁多,但根据其多轴控制系统的技术特点一般可分为三种类型:1)基于PLC的多轴控制系统;2)基于PC的多轴控制系统;3)基于总线的多轴控制系统。其中,总线控制系统具有数字信号传输、系
- 关键字:
控制系统 应用 研究 机器人 工业 总线 技术 CAN
- 在各大卖场的清洁用品区,常可看到一台圆盘状的机器在一个大桌面上滑动,碰到边会自己转换方向,就这样随机到处滑行,听说就能把家里的地板打扫干净。这可以说是目前真正进入生活中的机器人雏形的代表,虽然一点人样都没有
- 关键字:
CEATEC 机器人
- 地震的频繁和对机器人天生的喜爱之情让日本的救援机器人层出不穷3月11日,影响日本东部海岸的地震使岛国...
- 关键字:
日本抗震 机器人
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
机器人

- 日本的机器人专家计划使用KOHGA3地面机器人在日本本州岛东北部八户地区的一座坍塌的大楼里进行侦测。(图中所示是正在测试中的机器人)。
在日本仙台发生9级大地震之后,日本投入使用更多的机器人协助搜救和复原工作。
我们此前报导过,两支救援队正在整装待发,准备部署地面机器人和蛇形机器人。一支救援队位于东京,另一救援队位于仙台,并且他们准备在必要时到达日本任何地区参与搜救。
现在,我们了解到,另外两支救援队也准备使用机器人。一队由千叶理工学院的Eiji Koyanagi教授率领,他们是应位
- 关键字:
IEEE 机器人

- 摘要:采用Freescale公司的MC9SDG128单片机进行控制,使用ROHM公司生产的发送接收一体化反射型光电传感器RPR220,设计了一种新型迷宫机器人。该迷宫机器人能够在程序中严格控制光电传感器的开关,同时用软件消除外界
- 关键字:
机器人 设计 迷宫 电路 光电 传感器 基于
- 手术机器人引领医疗电子创新潮流,机器人不仅用于工业领域,在医疗系统也已得到推广应用。如大名鼎鼎的手术机器人(Surgical Robot)的问世不过短短10年,但同样取得重大进展。 实际上,手术机器人是一组器械的组合装置。它通常由一个内窥镜(探头)、
- 关键字:
机器人 创新 医疗电子
- 蝇控机器人实验中的信息流示意图
行业:
生命科学, 机器视觉/成像设备, 科研产品:
LabVIEW, CompactRIO, cRIO-9014挑战:
开发一个灵活的高带宽机器人设备,以便测量和仿真有翼昆虫的飞行方式。解决方
- 关键字:
CompactRIO LabVIEW 机器人 设备
ios 机器人介绍
您好,目前还没有人创建词条ios 机器人!
欢迎您创建该词条,阐述对ios 机器人的理解,并与今后在此搜索ios 机器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



