- 在最近一些机器人竞赛中,对于机器人的寻线行走,除了要求精确之外,对机器人寻线速度也提出了很高的要求,速度往往成为某些比赛制胜的关键。在最近教育部推出的全国大学生智能汽车大赛中,更是将寻线速度定为比赛的
- 关键字:
设计 实现 机器人 高速 视觉 基于 移动机器人 单片机 视觉 寻线
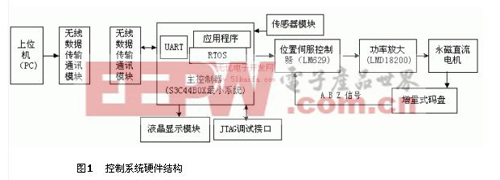
- 基于ARM+μc/os Ⅱ的教学机器人控制系统设计与实现,1.引言近年来随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多。在教育领域,许多院校已在学生中开设了机器人学方面的有关课程。为了满足机器人学方面的有关课程教学示范和实验教学的需求
- 关键字:
控制系统 设计 实现 机器人 教学 ARM c/os 基于 机器人 ARM UCOS 伺服
- 机器人开发平台的进展主要集中在如何让开发人员着手工作,但它们也提供更急需的软件部件重用方法,如从一个机器...
- 关键字:
机器人 开发平台 Labview
- 20世纪90年代以来,数字信号处理器(DSP)在自动控制中得到越来越广泛的应用。这主要是因为它具有以下优点:(1)...
- 关键字:
DSP 机器人
- 由科技日报社组织,部分院士、多家中央新闻单位及本报读者参与评选的“2008年国际十大科技新闻”今天揭晓。
2008年国际十大科技新闻是(按事件公布时间排序):
一、器官移植研究取得重要成果
美国明尼苏达大学心血管修复中心科学家1月13日在《自然—医学》杂志在线版发表论文称,他们通过给“脱细胞化”处理后的动物尸体心脏注入活细胞,成功地使这些心脏恢复了跳动。这是器官移植研究领域的重大突破,也是人类首次在生物体外用组织培养出完整器
- 关键字:
器官移植 记忆电阻器 基因组 机器人 夸克 强子 太空漫步

- 在蓝牙领域拥有较强实力的太阳诱电在本次高交会电子展上展示了太阳诱电的多项新技术产品,在展台前最吸引人的是两个能打保龄球的小机器人,工作人员介绍,这两个小机器人展示了太阳诱电点蓝牙技术,它基于最新的高速蓝牙技术,速度可以达到100Mbps。
此外,太阳诱电还展示了针对WPAN、WMAN、UWB、WLAN的无线技术整机解决方案,涵盖滤波器、天线、高频模块、软件及认证服务等,这些方案应用到手机、笔记本、办公设备、游戏机等。
&nb
- 关键字:
蓝牙 太阳诱电 机器人

- 东京,2008年9月29日 ——半导体行业全球领先公司之一意法半导体(纽约证券交易所代码:STM)和世界机器人前沿技术的领跑者早稻田大学仿人机器人研究院(HRI)宣布,双方合作开发出一款名为WV-1(早稻田双轮机器人1号)的高性能的双轮倒立摆机器人,这是目前正在进行的创新型仿人机器人和医疗护理机器人系统技术和解决方案研发合作项目的首项成果。
ST和HRI目前正在进行利用半导体前沿技术促进创新型仿人机器人和医疗护理机器人系统更快发展的合作项目。为推动相关技术和解决方案的开发
- 关键字:
半导体 意法半导体 机器人
- 摘要 嵌入式数据库一般不出现在表现层,所以很难被一般的用户所察觉。实际上,被称作“嵌入式数据库”的软件早在20年前就已经被组合在各种应用程序、软件组件和硬件环境中。它有两个很重要的特征——“嵌入性”和“实时性”。这里用实际应用的实例来说明,在嵌入式系统里如何有效地使用嵌入式数据库。
关键词 嵌入式数据库 工业控制 汽车导航 信息家电 宇宙航空&nbs
- 关键字:
嵌入式 数据库 工业控制 汽车导航 信息家电 宇宙航空 机器人 医疗信息系统 路由器

- 本课题研究的机器人工作在大约40 m深的浆液下,为了防止水煤浆由于长时间的存贮而沉淀,他能在按照预先规划的轨迹行走时完成搅拌功能。在这种条件下,一个很重要的问题就是机器人定位功能的实现,用来实时了解其具体位置。本机器人定位系统采用多路超声波传感器测距,然后采用三点定位法,把测距信息转化为机器人的位置信息。超声波作为一种无接触检测方式,与激光、红外以及无线电测距相比,在水煤浆中可以比较容易地穿透水煤浆达到测距的目的,且精度较高。
l 超声波测距系统
1.1 超声波测距原理
超声波测距原
- 关键字:
单片机 机器人 测距 超声波
- 一百多年以前,Nikola Tesla就曾设想要建造一个能够为全球提供无限能源的国际电网。但由于资金问题,这位塞尔维亚电学天才的研究工作未能持续到底,因此他的构想能不能够实现还是个未知数。
在一个世纪后的今天,英特尔(Intel)正在从事一项和Tesla构想极为相似的技术项目。在英特尔研发人员大会的最后一天里,英特尔首席技术官Justin Rattner介绍了公司这项无线能源项目,并在总结时用Tesla的照片结束了该演说。
不过,英特尔的这个项目并不完全和Tesla的设计相同。因为Tesl
- 关键字:
Intel 无线能源 发射器 Wi-Fi 机器人
- 新浪科技讯 8月22日消息,英特尔公司首席技术官贾斯汀(Justin Rattner)在英特尔秋季信息技术峰会上展望了令人振奋的计算未来,他认为,到2050年的时候,技术将使机器智能与人类智能更加接近。
贾斯汀在今天发表了主题演讲,他预测社交互动、机器人技术以及计算机感知真实世界的能力将实现巨大进步。贾斯汀表示,英特尔研究实验室已经开始关注人机界面,研究某些较预期更快到来的变化对未来计算性能的需求。
贾斯汀表示:“计算行业正以40年前人们难以想象的速度大步向前发展。有人认为我们
- 关键字:
英特尔 机器人 无线电源 WREL
- 仿生机器蟹控制系统需要较高的控制精度和运算速度,以便在机械结构刚度较高的情况下,通过提高响应速度来确保机器人的正常行走和姿态控制。由于在机器蟹腿节和胫节置有两个电机(如图1所示),使其质量较大,同时由于体积的限制使得各步行足相互间距较小,因此将造成机器蟹在行走过程中耦合较强,控制模型受躯体位姿、步行足位形和步态等因素的影响较大。这就要求控制系统控制结构灵活,具有调整步行足轨迹和步态的能力,并能适应控制模型的变化。因此必须研制一种具有强大运算处理能力、软硬件结构模块化的机器蟹控制系统。
从作业
- 关键字:
机器人 仿生 机器蟹 伺服控制器

- 对于一个欧洲产量最高的汽车制造商来说,生产线中各个环节的准确性和可靠性都是至关重要的。
Nissan所面临的问题是,现有的机械扶正器不能处理两个主要车辆的新玻璃型号。扶正器位于玻璃边线的6个点上,并且始终将其设于一个已知的“中央”位置,为下一道生产程序做准备。因此,重要的是,新视觉系统不仅能为两个新的型号提供准确信息,还可以很快适应未来生产的发展。
出于该方面考虑,Nissan基于多项重要原因与被选中提供系统的Capley Marker合作。他们预先为Nissan安
- 关键字:
康耐视 Nissan 机器人 视觉系统
- 0引 言
智能轮椅作为医疗护理领域的服务机器人,其应用大量使用了移动机器人技术。在智能轮椅的研究中涉及到的关键技术有导航系统、控制和能源系统、人机接口,但由于整个轮椅系统以人为中心,所以在研究中要解决的核心是轮椅的安全导航问题。所谓导航即是指移动机器人按照预先给定的任务命令,根据已知的地图信息作出全局路径规划,并在行进过程中,不断感知周围的局部环境信息,自主地作出各种决策,并随时调整自身位姿,引导自身安全行驶到达目标位置。
本文对智能轮椅导航中的核心问题进行了分析,指出了现行研究中涉及的各
- 关键字:
机器人 智能轮椅 人机接口 导航 传感器
ios 机器人介绍
您好,目前还没有人创建词条ios 机器人!
欢迎您创建该词条,阐述对ios 机器人的理解,并与今后在此搜索ios 机器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473




