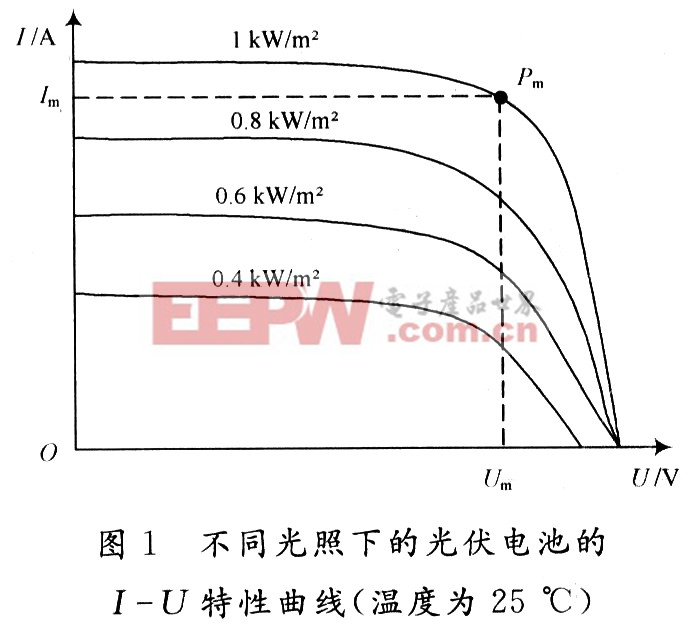
- 分析了太阳能光伏发电过程中最大功率点的原理,以及当前获得最大功率点的几种主要方法,提出了利用模糊控制来获取最大功率点的方法,模糊控制能够有效地克服光伏电池的非线性和时滞性,跟踪迅速,而且反应灵敏,计算量小,控制精度高,受外界影响小。并给出模糊控制器的详细设计过程,进行了Matlab仿真,获得了理想的结果,对比得出模糊控制方法的优越性。
- 关键字:
MPPT 设计 电池 控制 模糊 基于
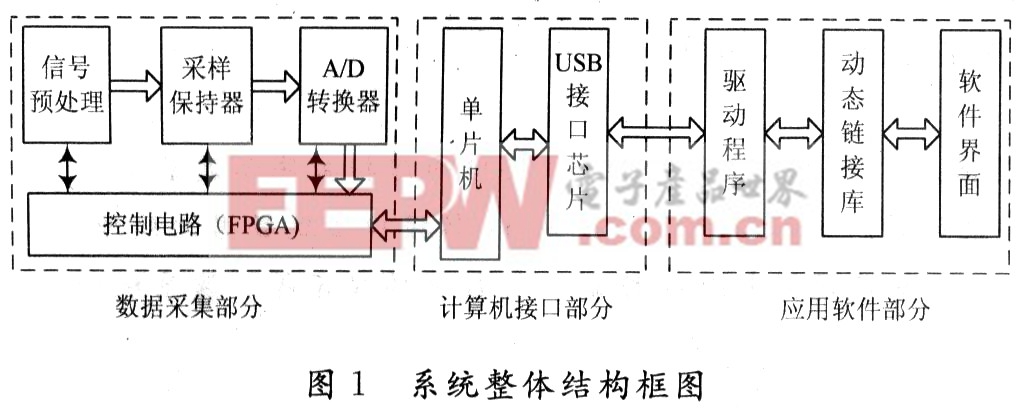
- 针对传统虚拟仪器不具有即插即用、热插拔等功能,提出基于FPGA控制及USB接口的虚拟数字示波器的设计方案和具体实现。系统主要包括数据采集、数据传输和应用程序设计等。采用FPGA控制和USB接口实现数据的处理、转换、存储与传输。同时使用Borland C++Builder进行软件设计,可实现对硬件电路的控制以及数据的显示等。该系统能实现幅度为±0.1~±25 V,频率为0~1 MHz信号的测量并显示。
- 关键字:
虚拟 仪器 设计 控制 FPGA USB 接口 基于 转换器
- 在工程中,常采用Modem通过模拟线路进行数据的远程传输。我们用工业级PIC16F87系列单片机控制Modem完成串行异步/同步通信,在较低速率的线路上实现了数据的实时传输,收到了很好的效果。 本文就系统中PIC单片机
- 关键字:
通信 设计 串行 Modem 单片机 控制 PIC

- 本文所设计实验,已经考虑较苛刻的时间及环境闪素,能说明整个系统具有良好的实时性。该实时控制方案的可行,有效降低了双臂单腿跳跃机器人控制系统的开发难度和成本,是关键的阶段性成果。
- 关键字:
控制 技术 研究 实时 机器人 单腿 跳跃 双臂 CAN
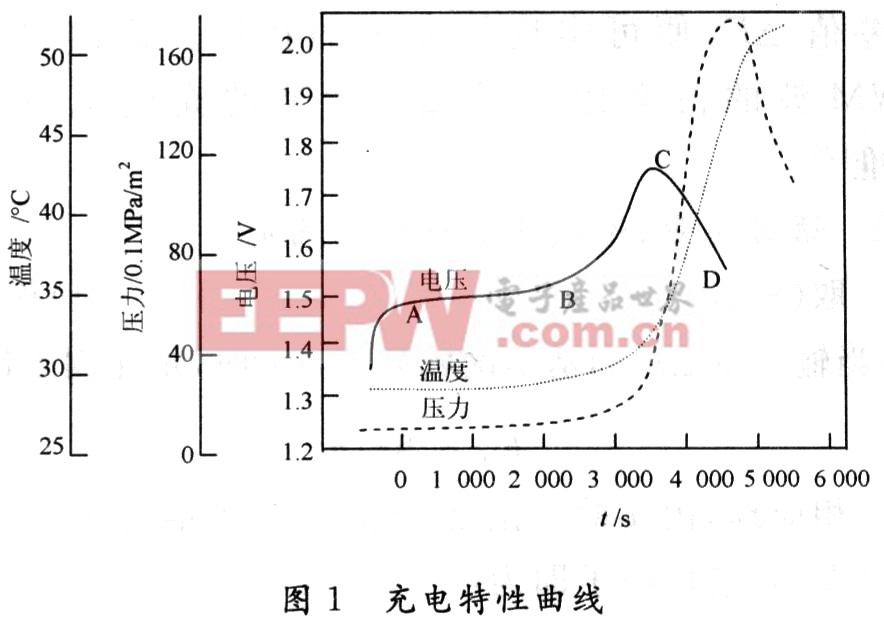
- 无人机应急电源作用重大但标配设备充电耗时且不够安全。通过分析电源的充电特性,根据模糊控制理论提出了一种通过查表运算实施快速模糊控制的非线性充电方法,并以MC68HC05SR3单片机为控制核心,设计出针对某型无人机应急电源的智能控制充电系统,优化了充电曲线,提高了充电速度。实验结果表明,该系统具有良好的快速响应曲线,可实现充电电流的最优控制,安全高效。
- 关键字:
快速 充电 方法 应急电源 无人机 模糊 控制 基于 转换器
- 1 引言
直流电动机脉宽调制(PWM)控制器UC3637用于控制开环或闭环直流电动机速度或位置,其内部产生1路模拟误差电压信号,并输出2路PWM脉冲信号,这2路PWM脉冲信号与误差电压信号的幅值成正比,并与其极性相关,
- 关键字:
设计 电路 控制 直流电动机
- 1、前言 如今电源管理技术的发展趋势是,以太网供电技术巨大市场近在咫尺,电源IC应身兼多职,电源转换IC集成LDO和DC/DC转换器,LED/LCD/OLED驱动器以及其他的功率半导体器件和电源模块。而本文仅对LED/LCD/OLED驱
- 关键字:
特征 应用 新技术 控制 照明 亮度 LED LED

- 动作感应有助于推动移动通信、浏览和总体数据使用的市场增长。据行业分析公司iSuppli 2009年年初发表的一份报告预计,在手机中采用加速计将使销量从2009年的2.2亿美元增长到2010年的4.26亿美元。
“到201
- 关键字:
运动 提供 精确 设备 控制 便携 智能 传感器 卡尔
- 0 引言
逆变电源通常采用双环或多环反馈控制,例如采用输出滤波电感电流滞环和输出电压反馈构成的双闭环控制、采用电容电流滞环反馈方式的闭环控制、采用固定开关频率电感电流反馈控制和采用固定开关频率电容电
- 关键字:
控制 逆变电源 电压 三环 TMS 0F 基于 电源
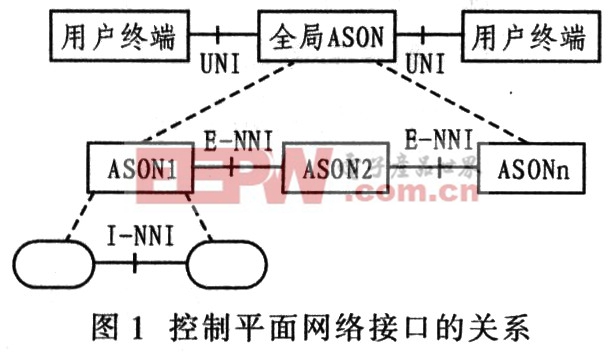
- 传送功能与控制功能相结合,阻碍了传统光网络智能化的实现。通过引入独立的控制平面,使智能光网络的实现成为可能。为此,介绍了自动交换光网络的概念;阐述了引入控制平面的优势及控制平面的基本构成。最后从网络接口、功能模块及信令协议的角度,讨论了自动交换光网络(Automatically Switched Optical Network,简称ASON)控制平面的核心技术。
- 关键字:
核心 技术 及其 平面 控制 ASON
- 一、 引言随着人们生活水平的提高,如何实现家庭防盗这一问题也变的尤其的突出,传统的机械锁由于其构造的简单,被撬的事件屡见不鲜,电子锁由于其保密性高,使用灵活性好,安全系数高,受到了广大用户的亲呢。设计本
- 关键字:
密码锁 电子 控制 单片机 基于
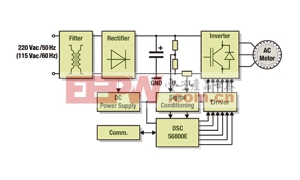
- 基于数字信号控制技术的控制方案使用一个具有MCU功能的数字信号处理器,用于控制电动机的供电,这种方案能够非常容易的在单芯片上实现。此外,灵活的外围设备也可以令设计工程师非常方便地实现各种各样的功能。使用可调速电动机驱动器让设计工程师有机会设计更多非常复杂和精确的控制程序,并可以增强设备的性能,同时又能提高能效。
- 关键字:
提高 运行 效率 技术 控制 交流电 动机 传感器 转换器
- CAN总线技术的引入彻底改变了工程机械控制领域的面貌,分布式控制系统完全取代了集中式控制系统,在众多具有CAN功能的控制器、传感器和执行器的支持下,繁琐的现场连线被单一、简洁的现场总线网络所替代,系统设计更加灵活、信号传输质量也大幅提高。
- 关键字:
领域 应用 控制 工程机械 技术 CAN CAN
鲁棒h∞控制介绍
您好,目前还没有人创建词条鲁棒h∞控制!
欢迎您创建该词条,阐述对鲁棒h∞控制的理解,并与今后在此搜索鲁棒h∞控制的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473