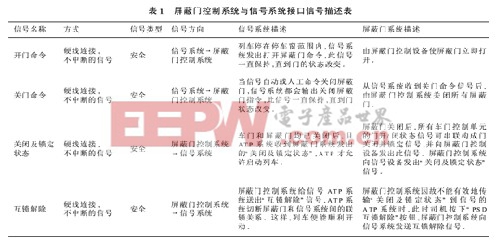
- 摘要:基于广州地铁1、2号线屏蔽门系统工程,分析、介绍了由车载和轨旁设备支持实施的LZB连续自动列车控制系统的控制和监督功能,从安全、合理的角度综述了信号系统与屏蔽门系统之间的接口控制关系。 屏蔽门(Pl
- 关键字:
系统 设计 分析 控制 接口 屏蔽 信号
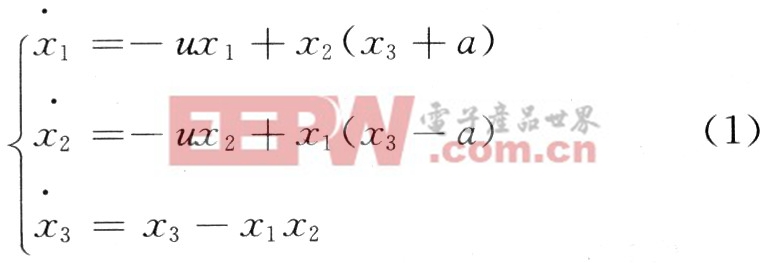
- 摘 要:针对变形耦合发电机混沌系统的结构特点,设计统一形式的非线性追踪控制器。根据非线性系统的线性化稳定理论,对系统同步误差稳定性进行分析和证明。这里所设计的控制器可以实现变形耦合发电机系统的状态变量与
- 关键字:
追踪 控制 系统 混沌 耦合 发电机 变形

- 摘要:访问控制是为了提高效益,增强竞争力,保障信息管理系统的安全而产生的一种信息安全技术。基于任务的访问控制模型(TBAC)是从应用的角度来解决安全问题,是基于主动式安全模型,以面向任务的观点来建立安全模型
- 关键字:
校图书馆 应用 模型 控制 任务 访问 基于
- 1 引言 随着DSP等数字信号处理器的出现,电力电子电路的数字控制得到了很大的发展。数字处理器能够瞬时读取变换器的输出值,并快速地计算出控制值对变换器进行控制。由于数字控制可以采用灵活的控制策略,一些
- 关键字:
控制 方法研究 PID 数字 变换器 DC/DC
- 1、引言
随着电子信息技术的发展,交错并联供电方式在通信电源、航空等领域中应用越来越广泛。变换器若能实现并联模块的交错运行,可以减小总的电压和电流纹波、减小电磁干扰,从而带来很多好处。在采用
- 关键字:
设计 部分 控制 电路 交错
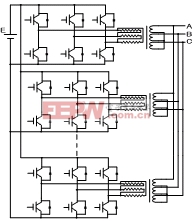
- 1 引言 中高压大容量电机的变频调速改造是国家节能减排工作的重点。中高压变频器的主功率电路普遍采用多电平逆变器拓扑,以达到降低功率器件的耐压等级、减小dv/dt、改善谐波等效果[1]。其中,H桥级联型结构的
- 关键字:
控制 研究 直接 传感器 变频器 速度 电平
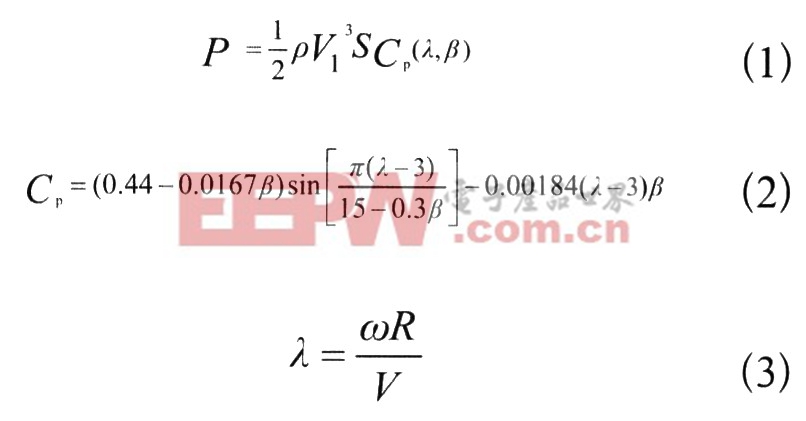
- 介绍了风力发电变桨控制的基本原理,对以输出功率作为控制量的变桨控制方法进行了仿真,并引入了一种带增益调度的变桨控制策略,通过仿真验证对比,证明了这种带增益调度的控制策略可以改善变桨控制效果。
- 关键字:
控制 研究 发电 风力 调度 增益 功率
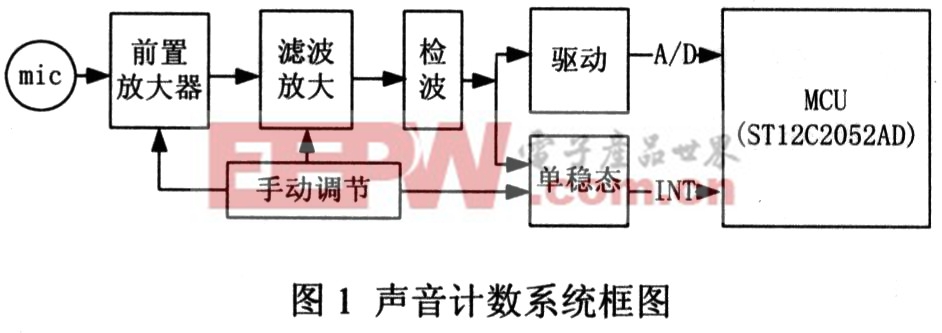
- 在打桩船上,环境噪声交错,要对打桩声进行计数以保存打桩次数记录是相对复杂的。文章结合模拟滤波放大处理与数字冗余滤波及微处理器的自适应识别控制提出了一种具体可行的设计方法,使得计数系统可靠性高,计数准确。
- 关键字:
控制 计数器 设计 声音 系统 自动 测量 打桩 转换器
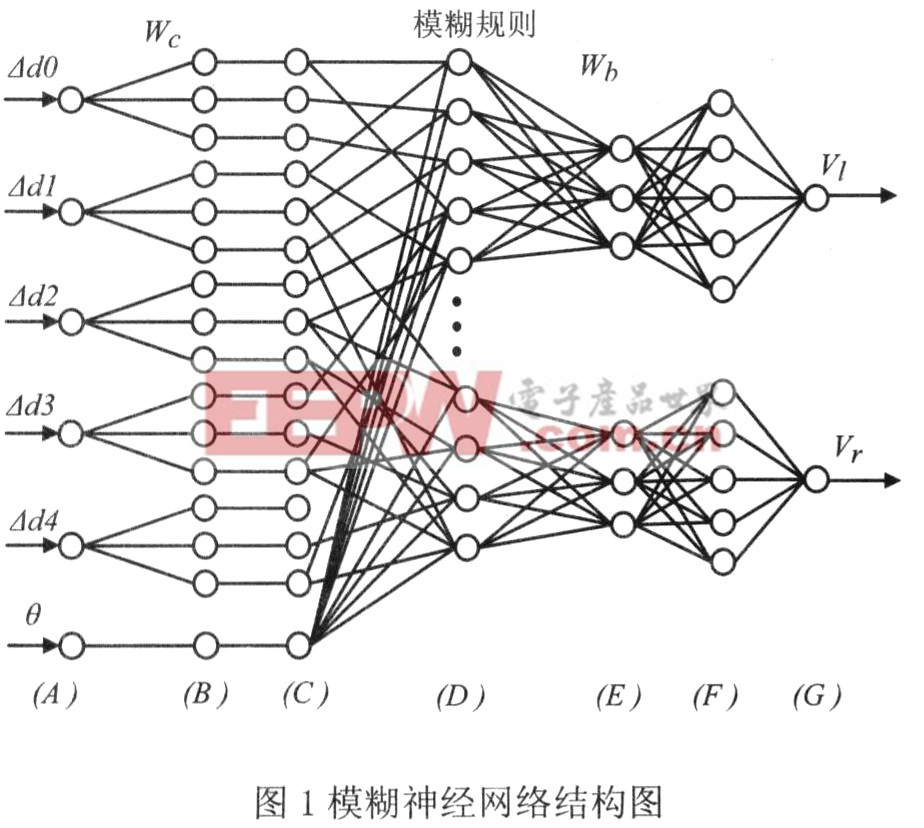
- 移动机器人沿墙导航控制包含了追踪和避障两种情况,是移动机器人研究中的常见问题。它是指机器人在一定方向上沿墙运动,或者更一般意义上的沿着物体轮廓运动,并与墙保持一定距离。移动机器人利用声纳采集机器人与墙体的距离和角度信息,通过模糊神经网络将输入数据进行融合,从而判断移动机器人的位姿信息,输出左右轮速度控制其动作。实验证明此方法可以有效地保证移动机器人在安全距离内沿墙体运动。对比采用模糊神经网络前后的实验,采用后的移动机器人沿墙导航控制轨迹优于采用前,均方误差大大减小。
- 关键字:
导航 控制 机器人 移动 模糊 神经网络 基于
- 随着城市建设的飞速发展,城市照明监控系统发展日新月异。以深圳为例,近几年来,于1999年建成使用的“三遥”...
- 关键字:
城市照明监控 系统 网络 管理 控制
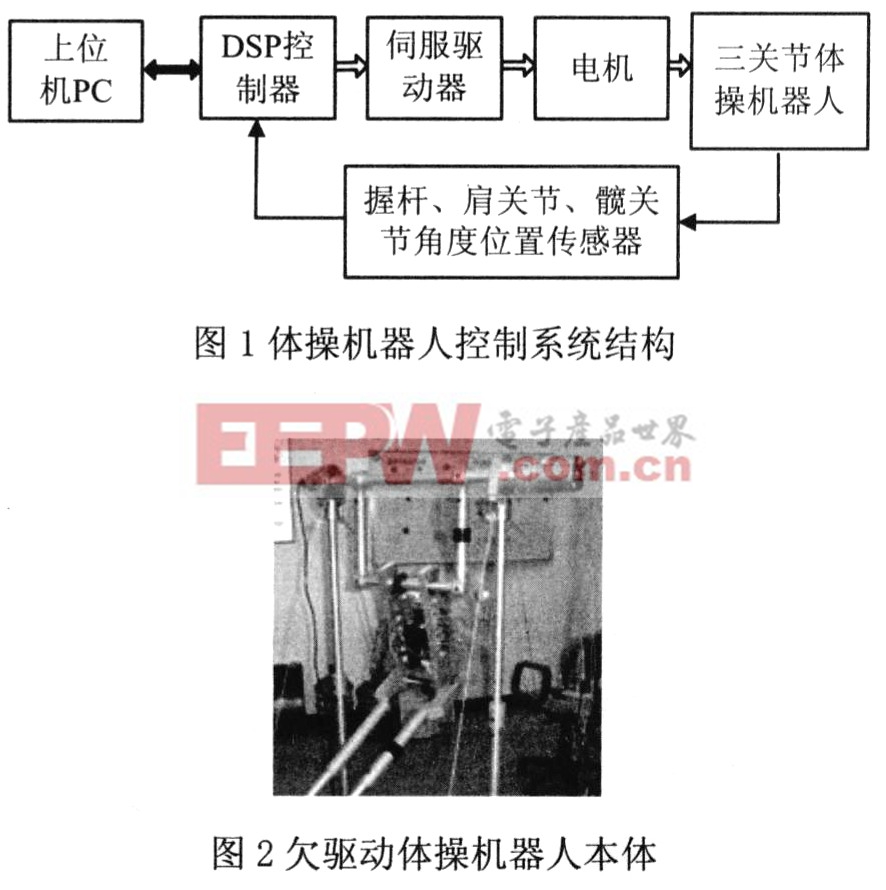
- 针对欠驱动机器人控制系统,给出一种基于DSP控制的类人形的三关节欠驱动体操机器人。首先以ADSP218l为核心设计出控制器,通过高速PCI总线与上位机PC通讯,采用直流电机伺服控制。然后依据建立的体操机器人动力学模型提出基于能量增加的正弦和斜坡函数输入方式,经对体操机器人作摇起控制实验,实验显示,设计的三关节欠驱动体操机器人控制系统满足实时性、稳定性和准确性要求。
- 关键字:
控制 设计 机器人 体操 DSP 驱动 基于 驱动器
鲁棒h∞控制介绍
您好,目前还没有人创建词条鲁棒h∞控制!
欢迎您创建该词条,阐述对鲁棒h∞控制的理解,并与今后在此搜索鲁棒h∞控制的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473