- 随着机器人投出的篮球在舞台上空划出一道弧线,不偏不倚地落入篮框,台下600多位来宾爆发出了热烈的掌声。在刚刚过去的NIDays全球图形化系统设计盛会中国站上,来自上海交大的学生向观众展示了他们设计的机器人,令人印象深刻。
10月22日,在由台湾机器人协会主办的的第二届国际机器人实作竞赛上,由上海交大王景川老师带领的四名上海交大自动化系研究生队伍设计的机器人获得了篮球机器人竞赛的亚军。清华大学年轻的本科参赛选手也凭借优秀的成绩获得第五名。同时参加该竞赛的还有台湾大学、淡江大学等多所知名学府的机器人
- 关键字:
NI 机器人 大学
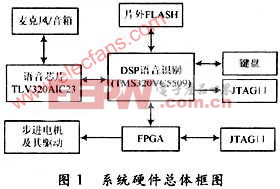
- 基于DSP+FPGA的机器人语音识别系统的设计,1 引言
机器人听觉系统主要是对人的声音进行语音识别并做出判断,然后输出相应的动作指令控制头部和手臂的动作,传统的机器人听觉系统一般是以PC机为平台对机器人进行控制,其特点是用一台计算机作为机器人的
- 关键字:
识别 系统 设计 语音 机器人 DSP FPGA 基于

- 电子技术的发展带动机电产品向智能化、人性化的方向发展。本系统采用嵌入式系统以ARM7为远程机器人控制核心,结合GPRS和WIFI无线网络,实现机器人远程控制和工作环境实时监控。安装相应的消毒结构,可以实现远程消毒工作,实现养殖消毒智能化。
- 关键字:
机器人 控制系统 设计 消毒 智能 ARM7 畜牧养殖 基于
- 摘要:本文首先简要介绍了危险品处理机器人的作用,机械手的结构形式,着重从控制系统、硬件设计和软件设计3...
- 关键字:
危险品 机器人 机械手 控制方案
- 北京时间10月11日消息,据国外媒体报道,美国国防部希望,未来的美军部队将会更快、更强、更具战斗力。因此,美...
- 关键字:
美国国防部 机器人 电子人
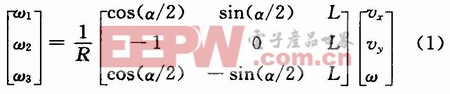
- 以RoboCup中型组足球机器人为实验平台,提出一种基于FPGA的全方位移动足球机器人运动控制系统的实现方法。首先分析和研究三轮全方位移动机器人的运动学特性,建立其运动控制模型,然后以FPGA为主要处理器,设计了PID速度闭环控制算法,实现了对机器人的精确控制。实验发现,该设计方法具有很好的实时性,能够对全方位移动机器人进行快速、准确的控制。
- 关键字:
FPGA 设计 控制系统 运动 机器人 中型
- 据美国物理组织网站报道,近日,美国哈佛大学的工程师最新研制一种汽车差动齿轮百万分之一大小的新型差动齿轮,可用于控制航空微型机器人的飞行,未来可用于监控环境危害、森林火灾和其它对人类带来威胁的区域。
这项最新技术首次实现微型飞行器被动地平衡空气动力,使它们的机翼能够响应风力、机翼损坏和其它实际中遇到的问题。哈佛大学工程和应用科学学院研究生普拉瑟维-斯里萨拉(PratheevS.Sreetharan)是该项研究负责人,他说:“这种新型航空微型机器人的动力传动系统与两轮驱动汽车拥有共同的特
- 关键字:
电子传感器 机器人
- 北京时间8月16日消息,据国外媒体报道,外骨骼的本来含意是指动物的外部骨骼,用于支撑或保护内骨骼。经过不...
- 关键字:
世界 机器人 外骨骼
- 日本科技公司“赛百达因”(Cyberdyne)研制的HAL-5是一款半机器人,拥有自我拓展和改进功能。它装有主动控制系...
- 关键字:
日本 机器人 HAL-5
- 本文设计了一种基于摩托罗拉MC68HC08系列单片机的机器人追跑控制系统,用于研究机器人之间的简单互动。
移动机器人行为描述
在此系统中,我们将两个移动机器人一个命名为“猫”,一个命名为“鼠”。当
- 关键字:
控制系统 设计 机器人 单片机 MC68HC08 系列 基于
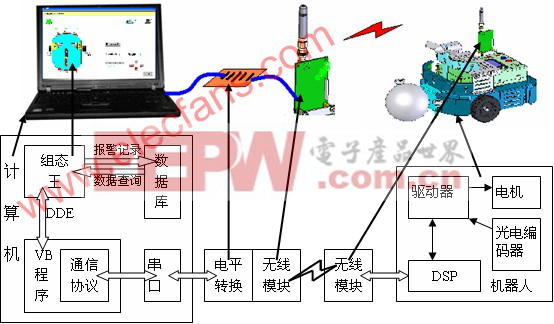
- 本设计的整体结构如图1所示。 图1 系统整体结构1.PC机监控软件的设计(1)首先完成组态王和VB的DDE对话。动态数据交换(DDE)是Windows平台下的一个完整的通讯协议,它使应用程序间能彼
- 关键字:
通讯 组态 监控 串行 无线 灭火 机器人 智能
机器人介绍
机器人目录
机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影——《我,机器人》
北京奥运会曾经使用过的机器人
机器人学国家重点实验室
机器人
日本最新机器人
美国战斗机械狗研制成功 网上引发轰动
搜索引擎术语
艾西莫夫机器人三定律 机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473





