- 近日美国马塞诸塞州立大学科技人员成功研制出一种名叫uBOT-5的医疗辅助,这种机器人可以为病人听诊,它甚至还能够为急救的病人拨打急救电话911。
这个名叫uBOT-5的医疗辅助机器人,有两个轮子、可以用两只手捡起地上的小物件。此外,uBOT-5可以用为病人听诊,它甚至还能够为急救的病人拨打急救电话911。参与这项机器人研制工程的计算机方面专家罗德表示,“目前对于医学辅助机器人来说,还是首次进行这样的尝试。机器人第一次变得是如此可爱、如此得贴近大众的生活。”对于它的价格罗德
- 关键字:
医疗辅助 机器人
- 通过对巡线机器人运动控制系统的分析,提出采用有限状态机实现运动控制系统中的运动保护及机构定位系统的方法。
- 关键字:
设计 控制系统 机器人 状态 基于
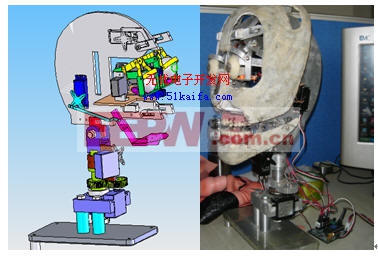
- 情机器人的研究在国内还处于初级阶段,为了推进这一新的科学热点的研究,本文从生物学的角度和和谐人机交互的角度出发,运用了机械设计、传感器技术、舵机控制、嵌入式系统、人工智能等技术设计了一个情感机器人头
- 关键字:
实现 设计 机器人 表情
- 作为日本国内首屈一指的国立大学,日本东京大学的财政收入主要依靠政府资助。仅在1979至1980 年度,日本政府给东京大学的拨款就达到了 800 亿日元,以后逐年增加,每年预算总在千亿日元以上。在政府雄厚的资金支持和一流的科研学术水平下,该校在机器人开发领域建树颇丰,成功制造了一系列尖端的机器人。早在2001年,东京大学就研发出了世界上第一只动物机器人——一只剪去翅膀的机器人蟑螂,期间日本政府向此项研究计划投资了340万英镑!2003年,东京大学的研究生院情报理工科学系科研小组,就成
- 关键字:
东京大学 机器人
- 介绍了一种由气动人工肌肉构建的双足机器人关节,该关节利用气动人工肌肉的柔性特性,可以有效控制双足机器人快速行走或跑步时的落地脚冲击问题。
详细给出了气动人工肌肉的工作原理以及由其构成的关节系统的硬件架构。同时介绍了基于此硬件关节搭建的控制软件系统。
双足机器人相比于一般的移动机器人在非结构化环境中具有更好的移动能力,因而受到研究者的广泛关注。控制机器人获得快速的行走速度以及实现跑动步态仍然是双足机器人领域中具有挑战性的问题之一。机器人快速行走或跑动时,摆动脚在落地的瞬间会产生一个较大的冲击
- 关键字:
机器人
-
奥地利维也纳技术大学的科学家日前展示了一种新型排雷机器人样机。这种排雷机器人的特点是探测灵敏度高、制造成本低。 这一名为HUMI的机器人重12公斤至13公斤,借助6个轮子运动,并装有摄像机和用于探测和识别地雷的活动机械手臂,能够发现埋在30厘米深的地下、重量超过两克的金属物体。 这一机器人的价格仅约7500欧元,远低于其他排雷机器人的价格,维修保养也方便,所需配件大多在市场上就能买到。自重轻也是它的一个优点。专家介绍说,目前有些地雷只要3千克
- 关键字:
奥地利 排雷 机器人
- 新华网哈尔滨12月25日电(记者颜秉光)哈尔滨工业大学25日说,由10名教师和学生组成的一个研发小组,成功研制出能表演广播体操的智能机器人。 这个智能机器人身高31厘米、体重1.6公斤,名叫“小萝卜头”,能在乐曲声中熟练地做伸展手臂、下蹲、转身等动作。 小萝卜头拥有16个提供能量的电机、16个能活动的自由度,身后安装一块控制板,其中蓝牙控制线能够接收电脑传来的蓝牙指令,电脑中事先存储设定了音乐、指令等,指挥机器人跳舞、做广播体操等。 小萝卜头的设计者之一、哈尔滨工业大
- 关键字:
高校 表演 体操 智能 机器人
- 最近,深圳高交会展馆的机器人展区内,一位身着汉朝衣冠的“将军”站在中央,它是以汉朝武将“腾飞将军”为形象的机器人,能与人交流。逼真的形象让众多参观者驻足不前。 随着科技的发展,现在,新的机器人推陈出新,不断给人们视觉带来巨大冲击。 不久的将来,一些机器人将走进人们生活,成为人类真正朋友。 ———新型机器人———“腾飞将军”以假乱真 “腾飞将军”身高1.6米,体重90公斤。“腾飞将军”浓眉大眼,长鬓角,八字胡
- 关键字:
机器人 中科院 深圳 先进技术 研究院
- 新华网哈尔滨12月8日电(记者颜秉光)网络上现在正流传着一段有趣的舞蹈视频:伴随着流行音乐,4个类似“变形金刚”的智能机器人时而跳跃、时而卧倒,卖力的舞蹈表演让观者忍俊不禁。 这些伴歌而舞的“小家伙”由哈尔滨工业大学的计算机专家和学生共同研发,此前在中国深圳举行的国际高新技术成果交易会(简称“高交会”)上大受欢迎。 哈工大多智能体机器人研究中心主任洪炳熔介绍说,这种智能机器人高约35厘米,有16个活动关节,整体重约2公斤,全身上下装有600多个机械零件,除了
- 关键字:
中国 高校 智能 机器人
-
接受检查 痛的表情 新华网北京11月29日专电在日本东京举办的2007年国际机器人展览28日展出了一个“牙科病人”机器人,它被用来帮助牙科实习医生在临床培训中更好地了解病人的疼痛。 这个医学仿真机器人的外形是一名迷人的年轻女子,名叫Simroid,身高1.6米,留着黑黑的长发,身着粉色毛衣。 Simroid能听懂牙医的指令,在接受治疗时若感到疼痛,“她”还会转动眼球或摇动手臂。当器械钻到口腔内神经时,“她”会皱眉头,小声叫“痛啊”。 Kokoro公司负责设
- 关键字:
日本 机器人

- “2007国际机器人展”11月28日在日本东京国际展览中心开幕。 中新社发 侯宇 摄
在为期4天的展览中,来自世界各国和地区的199家公司、66个团体和机构将在多达1071个展区中展示最尖端的机器人技术和相关产品。 中新社发 侯宇 摄
- 关键字:
直立 机器人 国际机器人展
- 2007年11月14日,重庆大学首台类人形足球机器人在重庆大学机器人创新基地诞生。这台机器人身高53厘米,有18个自由度,已经实现静态行走;可以通过摄像头识别不同颜色的物体,还可以感知自身的三维加速度信息和二维倾角信息,并以此来判断行走状态。 该机器人的研制是重庆大学建设高水平机器人足球队的一个重要举措。在该校实验设备处的资助下,自动化学院组织了由教授、青年教师和研究生组成的高水平研究团队,以重庆大学机器人创新基地为依托,刻苦钻研三个月,终于使该机器人按时研制成功。在该校举行的07年海峡两岸机器人足球学术
- 关键字:
重庆大学 类人形 足球 机器人
- 没有头领,却能自动组成群落,好似达成一致,集体行动,是蟑螂一大特点。为了研究蟑螂的这种社会习性,比利时科学家将“机器蟑螂”混入蟑螂群落,进行观察。 据美联社17日报道,布鲁塞尔自由大学约瑟
- 关键字:
智能 机器人
- 新华网 重庆11月14日电(记者王晓磊周衡义)14日上午9点,来自台湾成功大学、淡江大学等5所高校的32名师生带着他们研制的机器人,参加了在重庆大学举行的海峡两岸大学生机器人足球邀请赛。 比赛共设有微型足球机器人比赛、中型足球机器人比赛、舞蹈机器人表演赛三个项目。 来自台湾的有成功大学、长庚大学、中正大学、淡江大学、高雄第一科技大学等5所大学32名师生,大
- 关键字:
大学生 机器人 足球邀请赛
机器人介绍
机器人目录
机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影——《我,机器人》
北京奥运会曾经使用过的机器人
机器人学国家重点实验室
机器人
日本最新机器人
美国战斗机械狗研制成功 网上引发轰动
搜索引擎术语
艾西莫夫机器人三定律 机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473





