目录1.使用LEGOMINDSTORMSNXT进行原型开发2.使用iRobotCreate进行原型开发3.使用NISingle-BoardR...
关键字:
NI LabVIEW 原型开发 机器人
记者从广东省工业机器人高峰论坛上获悉,随着改革开放30年,广东GDP上升、劳动力最低工资上升、高素质劳动力紧缺等因素,我国必须使用机器人来提高制造业产业附加值、提高产品品质和保证质量统一。工业机器人及数字化装备发展面临着前所未有的好时机。
机器人是先进制造技术和自动化装备的典型代表,是人造机器的“终极”形式。机器人已经成为衡量一个国家制造水平和科技水平的重要标志。据联合国欧洲经济委员会报告,2008年全球工业机器人装机总量已经超过100万套。其中亚洲增长最快。预计到201
关键字:
机器人 自动化
使用iPAM系统的病人接受上肢治疗运动挑战:开发一种安全且可靠的机器人康复系统,对中风后手臂残障...
关键字:
LabVIEW 机器人 康复系统
使用NI LabVIEW软件最大的好处是可以设计且自定义图形化用户界面.
作者:
Cristiano Buttinoni, Certified LabVIEW Developer (CLD) - ImagingLab
行业:
Manufacturing, 电子
产品:
LabVIEW, 机器视觉附件
挑战:
用短批次和多样化的产品为装配电子元件设计一个紧密集成有机器人技术和视觉技术的系统
解决方案:
在NI视觉系统的指导下,用
关键字:
NI LabVIEW 机器人
使用iPAM系统的病人接受上肢治疗运动
作者:
Andrew Jackson - University of Leeds
Peter Culmer - University of Leeds
Martin Levesley - University of Leeds
Sophie Makower - Leeds Primary Care NHS Trust
Bipinchandra Bhakta - Leeds Institute of Molecular Medi
关键字:
NI LabVIEW 机器人
概览
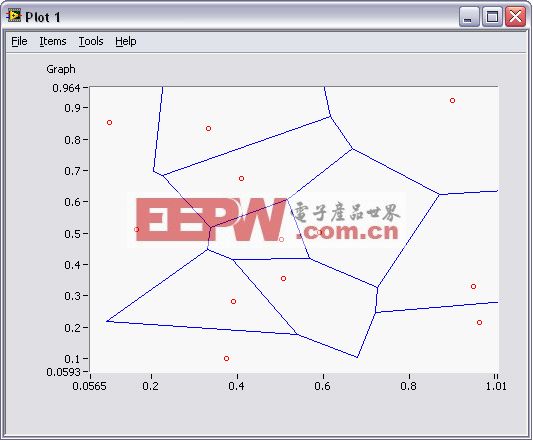
自主移动机器人的规划与导航包括利用有目的的抉择制定和执行来使系统实现最高级的目标。机器人是否胜任导航的能力必须通过两个技能来证明:路径规划和避障。
目录
1. 路径规划
2. 避障
3. 在中LabVIEW使用算法
路径规划
给定地图和目的地情况下的路径规划指的是机器人通过轨迹识别行进至目的地的能力。路径规划是至关重要的问题解决能力,因为机器人必须有能力决定在到达目的地前的路程中如何行进。
路径规划可分为两部分:表达与算法。路径规划人员首先将机器人
关键字:
NI LabVIEW 机器人
概览本教程对LabVIEW机器人模块软件自带的机器人算法进行介绍。从传感器直至路径规划,您都可以使用这个产品来设计新一代的复杂的自动化系统。LabVIEW机器人模块带有全新的功能完备的“机器人”选板,其中包含了设
关键字:
LabVIEW API 机器人模块 机器人
智能轮式移动机器人嵌入式控制系统设计,为了优化智能轮式移动机器人的控制系统,提出了一种基于ARM微处理器和复杂可编程逻辑器件(CPLD)的嵌入式控制系统。硬件部分采用以ARM和CPLD为核心的模块化设计,软件部分采用实时操作系统μC/OS?鄄Ⅱ,并设计了电机速度调节的控制算法。实现了对机器人驱动电机、超声传感等任务模块的系统控制。仿真和运行实验结果表明,系统运行稳定,控制灵活,达到预期的设计目标。
关键字:
控制系统 设计 嵌入式 机器人 轮式 移动 智能 数字信号
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动机构中,轮式移动机构最为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移动
关键字:
控制系统 设计 机器人 轮式 自动 单片机
Author(s):
关键字:
RoboCup 仿人机器人 美国 机器人
关键字:
CompactRIO LabVIEW FIRST 机器人
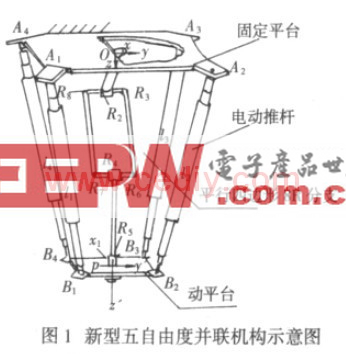
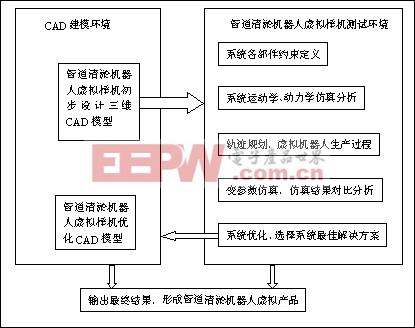
随着国民经济的迅速发展,环境污染日益严重,环保问题越来越受到社会各界的普遍关注。城市污水排放是确保环境卫生、建设现代化文明城市的重要一环。目前,我国绝大多数城市排水管道的清淤工作仍普遍处于人工作业
关键字:
机器人 虚拟 样机 设计 清淤 管道 pro/e 中小型 排水
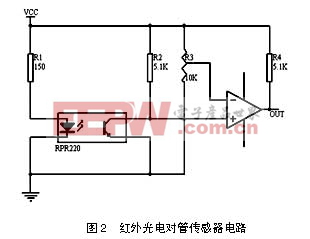
一种嵌入式智能寻迹机器人设计,1 引言 在信息技术的飞速发展,计算机,通讯、消费电子三种技术合一的后PC的时代,虽然计算机和网络已经全面渗透到日常生活的每一个角落,但各种各样的新型嵌入式接入设备已经成为当前的主流产品。任何一个普通人
关键字:
设计 机器人 智能 嵌入式 嵌入式
机器人介绍
机器人目录
机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影——《我,机器人》
北京奥运会曾经使用过的机器人
机器人学国家重点实验室
机器人
日本最新机器人
美国战斗机械狗研制成功 网上引发轰动
搜索引擎术语
艾西莫夫机器人三定律 机器人概述篇
机器人的组成
机器人发展史
机器人分类篇
机器人品种篇
人类与机器人
电影 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473