- 由于被判侵犯Tessera公司的两项封装专利,5家大厂的多款芯片产品可能在本月下旬被美国政府禁止进口,包括高通、意法半导体、飞思卡尔、Spansion和AMD子公司ATI Technologies。
Tessera公司最早於2007年5月控告上述5家和摩托罗拉公司侵权,要求依据著名的“337条款”禁止侵权产品进口。2008年12月,美国国际贸易委员会(ITC)行政法官作出初步裁决,认定被告公司并未违反337条款。但今年5月20日,美国国际贸易委员会(ITC)推翻之前的裁定
- 关键字:
飞思卡尔 芯片 封装
- 新闻事件:
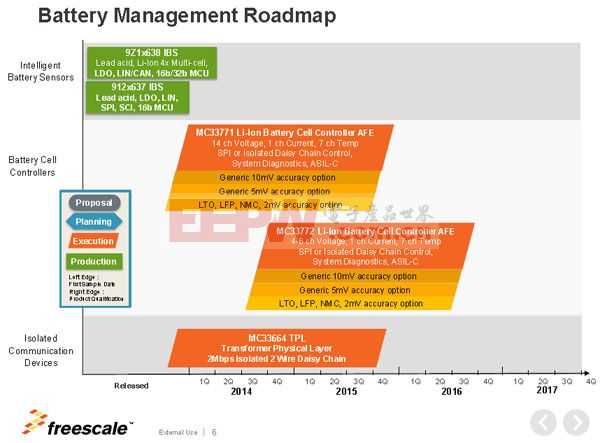
飞思卡尔半导体传感器装运量突破10亿只
行业影响:
飞思卡尔在业内商用汽车传感器供应商中排名第一
代表了飞思卡尔与客户的一个重要里程碑
飞思卡尔半导体提供的传感器技术创新,帮助全球客户过去三十年在汽车、消费、工业和医疗产品上实现重大变化。飞思卡尔一直在传感器领域处于领先地位,最近其传感器装运量突破10亿只,取得重要里程碑。
飞思卡尔提供行业内范围最广的传感器产品系列,在成熟的传感器市场中拥有强劲的发展趋势,该市场涵
- 关键字:
飞思卡尔 传感器 CMOS

- 前言
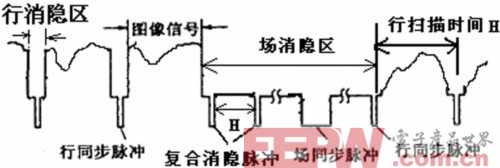
本文提出一种使用面阵CCD并且能够有效利用S12单片机内部硬件资源的路径参数检测方法。普通CCD图像传感器的工作电压一般为12V,输出NTSC或者PAL制式的模拟视频信号。利用S12内部的AD转换器,配合从视频信号中分离出的同步信号,可直接将图像信号采集到单片机内部RAM中,然后通过软件对图像信息进行处理,得到路径各种参数。
技术难点与解决方法:
直接利用S12单片机中的AD采集视频图像,存在着采集速度、存储数据空间、处理速度、工作电压以及同步信号分离等方面的技术难点。下面就这
- 关键字:
飞思卡尔 智能车 传感技术 面阵CCD S12
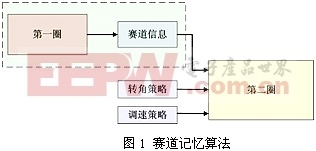
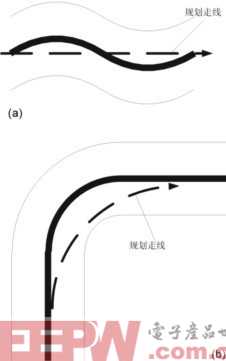
- 本文对智能车基于赛道记忆的控制算法进行了研究,分别从赛道记忆算法的实现前提、初圈记忆、数据分析与处理以及如何充分利用记忆得到的信息四个方面进行介绍。实车试验表明,对于相对简单的比赛赛道,基于赛道记忆控制算法的智能车可以取得较好的成绩,随着赛道的日趋复杂,赛道记忆算法也有很大的潜力。
- 关键字:
飞思卡尔 智能车 传感技术 智能车 赛道记忆 控制算法

- 2006年8月21日,全国大学生智能汽车竞赛暨第一届“飞思卡尔”杯全国大学生智能汽车邀请赛决赛阶段比赛在清华大学体育馆举行,来自全国57所大学的112支参赛队用他们精心设计的智能模型车在赛场上一较高下。最终清华2队技高一筹获得第一名,上海交大速度之星队和清华1队分列二、三位,历时8个多月的大赛终于落下帷幕。组委会主任中国工程院吴澄院士、教育部高教司张尧学司长和飞思卡尔半导体高级副总裁兼汽车与标准产品部总经理Paul Grimme先生等嘉宾现场观看了比赛并为获奖选手颁奖。
- 关键字:
飞思卡尔 智能车 传感技术

- 摘要:本文对邀请赛选用的主控芯片MC9S12DG128单片机的一些外围接口模块作了介绍,包括功能上的描述和例程及初始化的过程,对一些参赛队伍中遇到的Flash锁死问题也提供了解决的方案。
- 关键字:
飞思卡尔 智能车 传感技术

- 本文针对智能车比赛用模型车底盘,从汽车理论的角度对转向轮定位参数、车辆的重心选择、侧滑等原理进行了介绍,并通过对转向轮定位参数、舵机性能以及模型车转向稳态性的测试,得出了这些调整参数之间的影响规律,可以为相关参赛队伍在算法制定、仿真参数设定以及底盘、舵机等硬件结构调整、优化等方面提供一定的参考。
- 关键字:
飞思卡尔 智能车 传感技术 前轮定位 舵机 转向 转弯半径

- 韩国智能模型车竞赛是韩国汉阳大学举办的以单片机控制为核心的可以自行寻迹行驶、以速度快慢为主要评判指标的大学生课外科技竞赛,国内也将举办此类比赛。为了帮助参赛队伍更好地认识智能模型车的特点,提高参赛队伍水平,本文针对2005年韩国大学生智能模型车竞赛的16支队伍的技术方案,对电源管理、路径识别、电机驱动、转向控制、车速传感等硬件结构及软件控制特点进行了分析,对智能模型车的设计提出了建议。
- 关键字:
飞思卡尔 智能车 传感技术 电源管理模块 光电传感器 道路自动识别 单片机
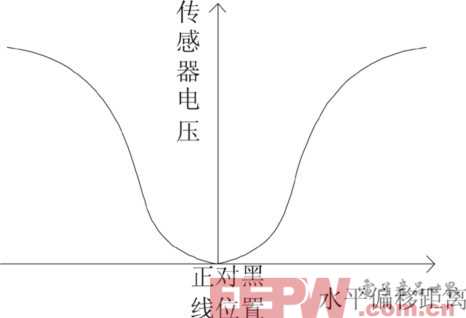
- 基于间隔布置光电传感器的离散路径识别算法是无人车最简单的路径识别算法之一,容易造成转向及车速调节的阶跃式变化,使得控制不佳。本文在对光电传感器特性研究的基础上,提出了一种基于间隔布置红外光电传感器的连续路径偏差识别算法,得到的路径信息是车身纵轴线偏移路径标记线的距离,消除了传感器间隙的“盲区”, 为控制的流畅性提供了可能。
- 关键字:
飞思卡尔 智能车 无人车 导航 光电传感 路径识别
- 要实现一个完整的基于摄像头的智能小车,第一步要做的就是将摄像头输出的模拟信号通过单片机AD转换采集到单片机中,然后对采集到的原始的图像数据进行处理,以获取赛道中央的黑线在图像坐标系中的位置。
接着,就要利用处理得到的图象信息对智能小车进行控制。就目前而言,各参赛队用的最多的横向控制(转向控制)就是PID控制。采用PID控制方式,无需对摄像头作严格的标定,因为只须将黑线在图像坐标系中的位置偏差乘相应的PID系数,就可以作为转向的控制律,至于PID系数取多少,则可以通过简单的实验调试而获得合适的取值
- 关键字:
飞思卡尔 智能车 传感技术 摄像头
- 系统功能及应用
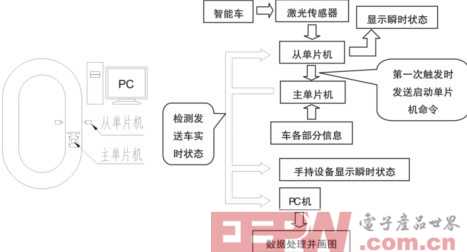
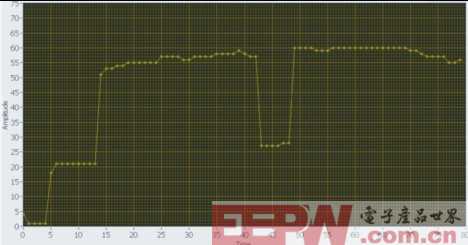
本系统主要完成将智能车行驶过程中的各种状态信息(如传感器亮灭,车速,舵机转角,电池电量等)实时地以无线串行通信方式发送至上位机处理,并绘制各部分状态值关于时间的曲线。有了这些曲线就不难看出智能车在赛道各个位置的状态,各种控制参数的优劣便一目了然了。尤为重要的是对于电机控制PID参数的选取,通过速度—时间曲线可以很容易发现各套PID参数之间的差异。对于采用CCD传感器的队伍来说,该系统便成为了调试者的眼睛,可以见智能车之所见,相信对编写循线算法有很大帮助。而且还可以对这
- 关键字:
飞思卡尔 智能车 传感技术 车载数据采集系统 无线数传系统 上位机数据处理系统
- 在去年的Freescale全国大学生智能车大赛中,赛道信息检测方案总体上有两大类:光电传感器方案和摄像头方案。前者电路设计简单、信息检测频率高,但检测范围、精度有限且能耗较大;后者获取的赛道信息丰富,但电路设计和软件处理较复杂,且信息更新速度较慢。在比较了两种方案的特点并实际测试后,我们选择了摄像头方案。本文将在获得摄像头采集数据的前提下,讨论如何对数据进行处理和控制策略的实现。
数据采集
我们选择了一款1/3?OmniVision?CMOS摄像头,用LM1881进行信号分离,结合AD采样
- 关键字:
飞思卡尔 智能车 传感技术 CMOS 摄像头
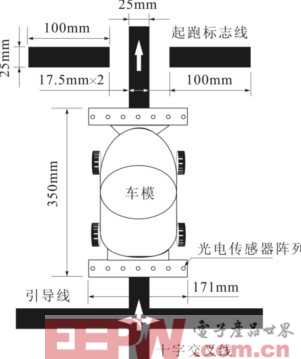
- 由于智能车模要在黑色引导线的识别过程中跑完全程,所以采用的寻线传感器主要是光学传感器。为了实现车模的记忆路况算法,首先要求车模系统能够识别起跑线,并区别于十字交叉线,本文介绍了车模系统识别起跑线的红外光电传感器的布局模型和设计。
- 关键字:
飞思卡尔 智能车 红外光电传感器 巡线算法 起跑线 引导线
- 引言
按照第一届全国大学生“飞思卡尔”智能车大赛比赛规则要求:使用大赛组委会统一提供的竞赛车模,采用飞思卡尔16 位微控制器MC9S12DG128 作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,以比赛完成时间短者为优胜者。其中赛道为在白色底板上铺设黑色引导线。根据赛道特点,主要有两种寻线设计方案:一、光电传感器方案;二、摄像头方案。
这两种方案各有特点:其中光电传感器构成“线型检测阵列
- 关键字:
飞思卡尔 智能车 传感技术 光电传感器 摄像头

- 路径识别是体现智能车智能水平的一个重要标志,而传感器是智能车进行路径识别的关键检测元件。针对智能车在特殊路径与传感器数目限制的条件下的路径识别,提出了基于红外传感器的路径识别方案与基于图像传感器的路径识别方案,并对两种方案的应用性能进行了比较。通过将基于面阵图像传感器的路径识别方案应用于智能车竞赛并取得优异成绩,验证了该方案的可行性与有效性。
- 关键字:
飞思卡尔 智能车 红外传感器 图像传感器 路径识别
飞思卡尔介绍
您好,目前还没有人创建词条 飞思卡尔!
欢迎您创建该词条,阐述对 飞思卡尔的理解,并与今后在此搜索 飞思卡尔的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473