基于DSP的手势识别电视遥控器设计

2. 4红外遥控模块电路设计
本文引用地址:https://www.eepw.com.cn/article/271879.htm红外遥控模块包括三个部分:接收部分、发送部分和数据处理部分。接收部分包括光电转换、解调、高速采样以及数据分析等模块,发送部分包括遥控发送和电光转换模块,数据处理部分包括中央处理以及存储模块。
3系统软件设计
3. 1手势图像预处理算法
手势图像提取算法选择帧间差分的方法实现手部图像分割。利用间隔短暂时间的两帧图像比较,获取两张图像运动方向的手部围成的一小段白色区域,然后采用阈值分割的方法对获取的图像二值化,消除噪声,最后根据此图像序列含有的白色像素点的多少来确定图像序列中有无物体存在。对手势图像预处理的算法描述如下:
1)从视频图像序列中选取相邻n帧的两帧图像,其中前一帧图像为Pk-1( x,y ),如图6( a)所示,后一帧图像为Pk( x,y),如图6( b)所示;
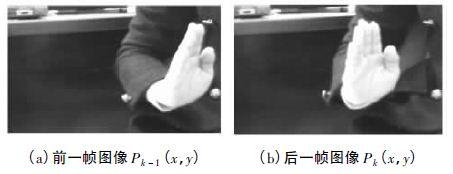
图6从视频图像序列中选取的图像
2)为了减少计算量,将480×640的图像隔4行6列提取像素点,左右各忽略20列,上下各忽略40行,获得两帧100×100的图像
和
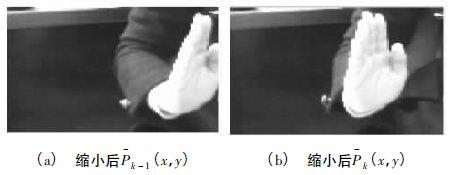
图7缩小后的图像
3)计算后一帧与前一帧的差为Gk( x,y),得到目标的变化量,如图8所示;
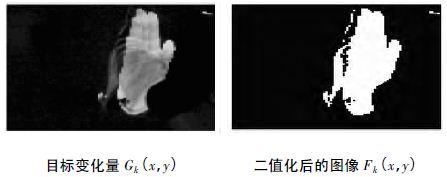
图8两幅图像的目标变化量
4)对帧间差分法得到的图像按选定的阈值进行二值化,得到目标图像序列的二值化图像序列Fk( x,y),如图9所示。其中,

式( 1)中,T为阈值。对于给定视频序列的图像,假设像素点k处没有运动,其帧差dk服从均值为0,方差为σ2的Gauss分布N( 0,σ2) :

式( 2)中,H0表示无运动假设,σ2是帧差的统计方差,通常认为它等于摄像头噪声方差的两倍。根据概率统计假设检验“3σ”法则和“正确的阈值T应该能消除大部分噪声”的原则。经试验测试得阈值T选择在35~45之间比较合适。二值化后的图像如图9所示。观察Fk( x,y)的图像序列,可以看到图像中的噪声很少,这是因为①帧间差分法达到了加大目标信息的权重,同时抑制了静态背景的效果;②摄像头采集范围背景比较单一,光线均匀。
Fk( x,y)中主要存在两大类的噪声。一种是由于光线变化产生的噪声,这种噪声往往以孤立的黑色像素点的形式出现。第二种噪声是一些面积较小的背景块。为了尽可能消除这两种噪声,可以求每个N×M小块的灰度平均值,根据灰度平均值可估计出白色区域的大小。当灰度平均值小于某一阈值时,可以认为是噪声,把对应的N×M个点赋值为0.算法实现如下:
( 1)建立一个大小是Fk( x,y)的1 /25倍的矩阵来存20×20个5×5像素块的平均灰度值fk( x,y)。
( 2) fk( x,y)和Hk( x,y)满足如下关系:
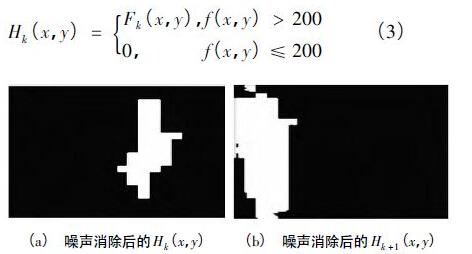
图10噪声消除后的图像

万能遥控器相关文章:万能遥控器代码
红外遥控器相关文章:红外遥控器原理 摄像头相关文章:摄像头原理









评论