DIY一款具运动状态追踪功能的遥控玩具,做守护天使

3.4.3 飞机的控制算法
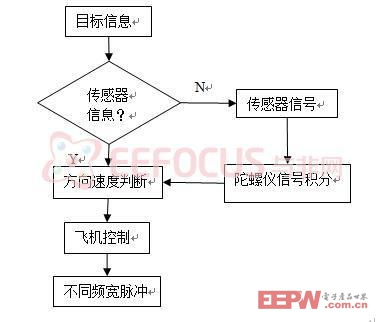
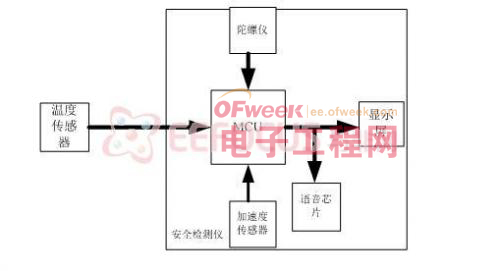
图9 系统控制算法结构框图
假设儿童是一个有一定大小的点,即可以在三维空间内自由运动。根据测得的加速度可以得到儿童的速度和位移。考虑到测量过程中重力加速度的影响,通过加速度计算得到速度和位移的最基本方程为:
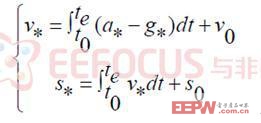
其中*代表绝对坐标系 X,Y,Z 轴向中的任意一个,v0,s0分别是初始速度和位移,t0是测量开始时间,te是测量终止的时间。在测量中只需要测量 X,Y,Z三个轴向上的加速度以及运动的起始和终止时间t0,te就可以得到三个轴向上的速度和位移特征。
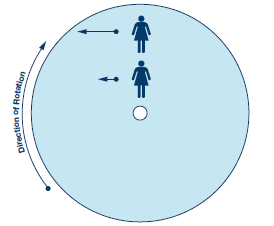
如果数据采集周期 T 很小,则在 ∆ t 时间内可以认为其运动状态为匀速运动,通过 X、Y 方向的位移计算可以求ψ、θ 角,从而可以控制飞机的转弯飞行等。
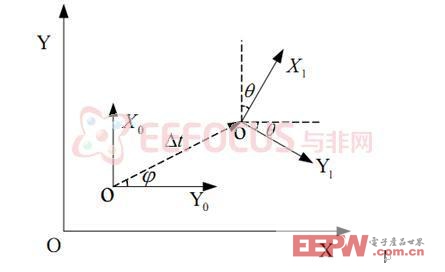
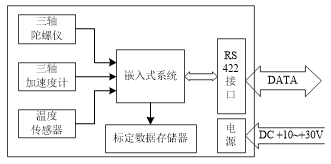
图10 系统数据采集模块运动示意图

.jpg)



评论