DIY一款具运动状态追踪功能的遥控玩具,做守护天使

三、方案设计
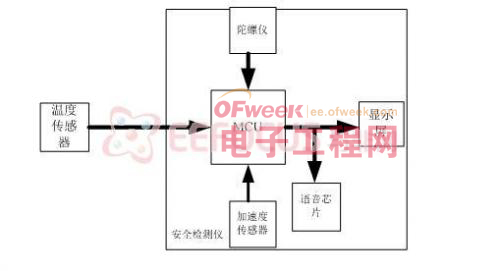
3.1 系统功能实现原理
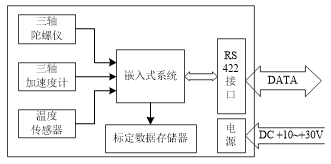
系统主要包括运动状态采集模块,无线通信模块,飞机硬件模块。
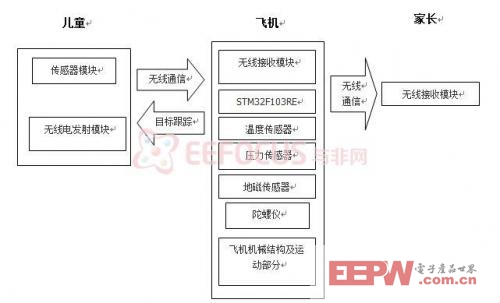
图3 守护天使系统硬件架构图
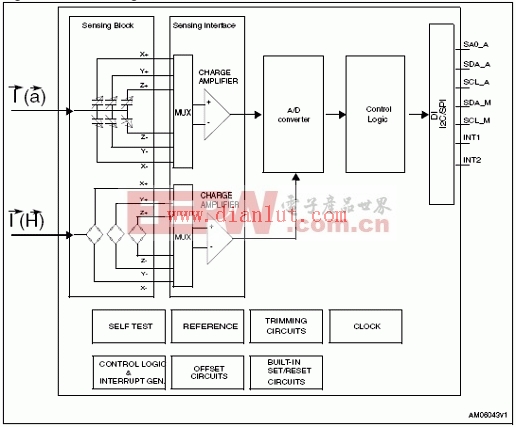
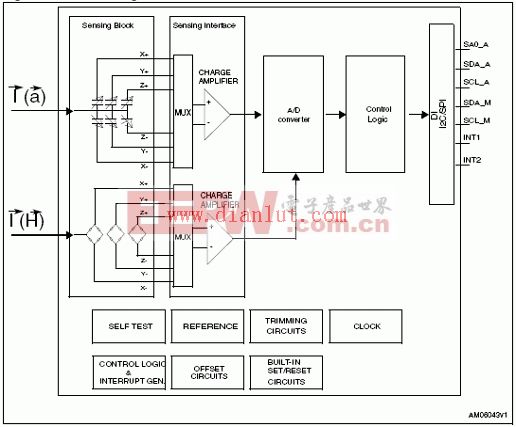
3.1.1运动状态采集模块
守护天使系统的运动采集模块包括的传感器是陀螺仪以及加速度及,其中通过陀螺测定转动速度并以微加速度计测定运动状态。跟踪目标(儿童)的运动状态信息(加速度,转角)传给无线通信子系统的发射模块。
目标状态测定的准确性直接关系到整个系统的工作性能。
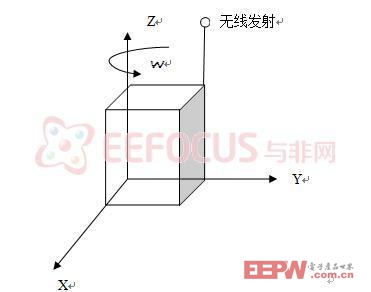
图4 信息采集系统
3.1.2无线通信子系统
该系统包括两组无线发射模块和无线接收模块。
第一组无线发射模块(置于儿童身上)把陀螺仪及加速度计的采集的目标信号发射给飞机上的接收装置,接收装置直接将信号传给存储器。飞机通过无线接收模块接收传感器的信号,并通过MCU发出的命令进行运动,通信的高速性、稳定性和准确性至关重要,它直接影响了整个系统的采样周期。
第二组无线发射模块置于飞机上,将从儿童身上采集的目标信号及自身传感器采集到的信号发射给接收装置,接受装置将信号显示在遥控器的LED上。
本系统选用iNEMO系列模块配备的ZigBee通信协议来实现这部分功能。



.jpg)

评论