大型货车超载超速实时检测系统

Void BeforeTheStateDidNotExercise(float* parameter,float weight,int *countR,int *countW)
{
(*countR)++;
if(*countR>=17)
*countR=0;
if(weight>M)
{
(*countW)++;
if(*countW>=12)
{
*parameter=0;
*countW=0;
overloadAlarm();//启动报警
}
}
}
运动中超载处理程序:
void campaignStatus(float* parameter,float weight,int *countR,int *countW,clock_t *start)
{
if(* parameter!=1)
(*countR)++;
momentNow();//记录当前时间
*start=clock();
t1recordTheCurrenttime();//记录当前时间
if(weight>M)
(*countW)++;
if(*countR>=100)
{
if( *countW>=70)
{
overloadAlarm();//启动报警
* parameter=1;
}
*countR=0;
*countW=0;
}
}
运动后停车超载处理:
void afterStoppingState(float* parameter,float weight,int *countR,int *countW,clock_t *finish)
{
(*countR)++;
//记录当前时间t2
*finish=clock();
if(weight>M)
(*countW)++;
if(*countR>=100)
{
if(*countW30)
{
*parameter=-1;
sendRelevantInformationToTheHost(countW,countR);// 发送相关信息到主机
}
*countR=0;
*countW=0;
}
}
//根据速度和参数K和parameter确定车体状态
void carStatus(float speed,float* parameter,float weight,int *countR,int *countW)
{
//超载持续时间
clock_t start, finish;
double duration;
if(speed==0)
{
if(*parameter=0)
BeforeTheStateDidNotExercise(parameter,weight,countR,countW);
else
afterStoppingState(parameter,weight,countR,countW,clock_t finish);
}
else
campaignStatus(parameter,weight,countR,countW,clock_t start);
//超重持续时间
duration = (double)(finish - start) / CLOCKS_PER_SEC;
printf( %f secondsn, duration );
}
//获取当前时间
int momentNow(void)
{
time_t t;
t=time(0);
local=localtime(t);
printf( %d-%d-%dn%d:%d:%dn,local->tm_year+1900,local->tm_mon,local->tm_mday,local->tm_hour,local->tm_min,local->tm_sec);
return 0;
}
4.2 获取速度模块设计
4.2.1 硬件设计
本方法采用测量一个转盘的转速间接地测出货车的速度,因此转盘要与货车的转轴相连,转盘的转速与车轴的转速成一定的关系。将转盘等分为四等份,在每等份的分界线上安装一块磁钢,如图4.2所示。
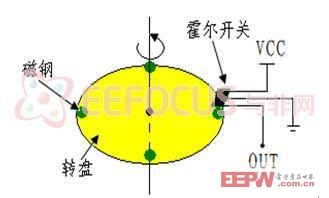
图4.5 测速硬件原理
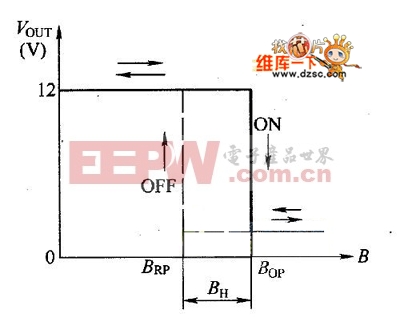
霍尔开关的VCC端接5~12V直流电源,OUT端接到SPCE061A的IOB3(外部中断2输入口)[27],另一端接公共地。每次磁钢经过霍尔开关下方时,OUT端都会产生一个脉宽的负脉冲。
称重传感器相关文章:称重传感器原理 倾角传感器相关文章:倾角传感器原理

评论