基于MC9S12XEP100的旋转磁场定向测距系统设计
——

编者按:摘要:针对传统基于地磁导向的连续测斜系统易受干扰以及惯性导航的陀螺测斜系统具有积分漂移误差,难以满足连通井导向定位高精度测量的需求,提出一种基于旋转磁场闭环定向测距的系统方案,完成了该系统的硬件电路设计、软件设计以及远距离通讯协议设计,并进行了地面实验。该测距系统由地面系统和井下系统组成;其中,井下系统用于数据的采集、地面系统用于数据接收和命令传输,系统之间数据采用曼切斯特码传输以提高精度降低误码率。
磁场测量采用三个正交的MS-03AR型高精度磁通门传感器以Fs=200Hz的频率对其采样;加速度传感器采用Honeywell的QA-T160。由于采集的磁场信号比较微弱(nT级)并且混有噪音,须进行滤波降噪和放大处理。采集的磁场信号其干扰是高频部分,设计采用截止频率分别为6Hz和4Hz低通滤波器进行处理;并将滤波后对信号进行放大,其电路如图5所示,U10A及其前部分组成截止频率为6Hz的低通滤波器,U10B为电压跟随器。信号调理完成后,采用A/D转换电路对模拟信号进行转换;并将转化后的数字信号送入MC9S12XEP100单片机进行相关处理。CPU处理完成后,将信号输出进行编码,其电路如图4所示。
本文引用地址:https://www.eepw.com.cn/article/248895.htm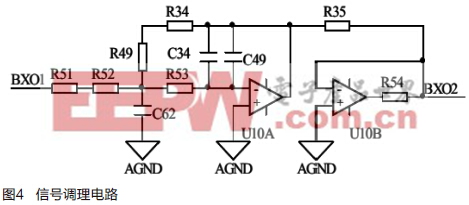
3 软件设计
3.1 通信协议
系统正常工作采用1553协议通过单芯电缆进行数据传输。上位机下传命令如表1所示,主要包括交直流量采集、状态设置、状态查询、通讯握手和停止采集等命令。下位机数据上传格式,采用数据帧长度、数据包、帧校验的形式,其中数据包包含交直流量、状态查询、状态等。如表1。

3.2 井上系统软件流程图
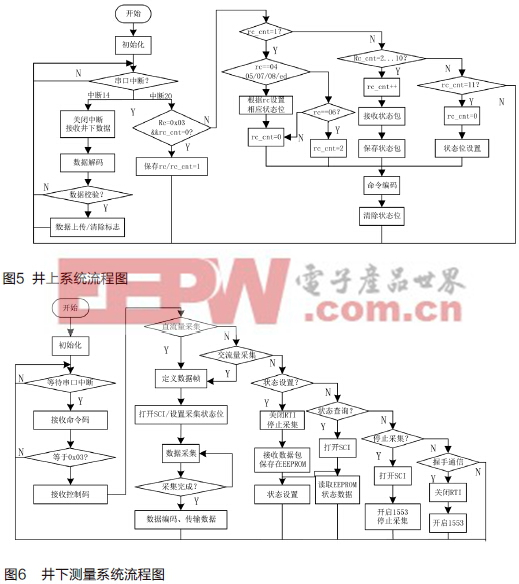
结合1553协议和井上通信系统的功能进行软件开发,其工作流程图如图5所示。首先,系统关闭中断,对PLL、PWM、SCI、PORT、编解码等模块进行初始化,完成初始化工作后开启中断;其次,等待中断,当检测到串口中断时,进行相应的中断处理。系统主要有两大中断:第一,中断20用于转发上位机发送的命令,其中0306命令之后包含状态设置数据包(13Bit)的接收,接收完成后对其进行编码并转发至井下测量系统;中断14用于接收井下系统返回的数据包。数据包在接收完成之后对其进行解码并转发至上位机。最后,清除相关设置,循环等待中断。如图5。







评论