基于飞思卡尔MK10N512微控制器及MQX操作系统的电梯主控系统设计

摘要:本文首先简要介绍飞思卡尔MK10N512微控制器以及MQX操作系统,然后详细介绍基于它们的电梯主控系统硬件和软件设计。硬件系统设计重点介绍微控制器通信外设接口与总线接口的设计。软件系统设计从开发环境、软件架构、系统初始化、任务设计、通信设计、电梯控制运行等方面来详细论述。
本文引用地址:https://www.eepw.com.cn/article/248893.htm前言
随着社会的快速发展,人们对电梯的需求从最初的提供大楼上上下下的运输服务,到现在的安全、舒适、可靠的乘坐体验。这对电梯控制的要求越来越高,以前的继电器控制技术已经不能满足现在的需求。带微处理器、微控制器的嵌入式控制系统已取代继电器控制系统,成为当今电梯主流控制系统。
1 主控芯片介绍
MK10N512是飞思卡尔公司提供的超低功耗、高数据安全性、高性能的ARM Cortex-M4微控制器系列芯片。ARM Cortex-M4内核的SVCall和PendSV中断非常适用于实时操作系统的任务切换,内置的系统时钟节拍模块能够为实时操作系统提供系统时钟。
MK10N512芯片具有1.71~3.6V宽工作电压,闪存编程电压低至 1.71 V;其最高工作频率为100MHz,在此频率下的处理性能达到125DMIPS,性能满足电梯控制要求。MK10N512内置512kB Flash ROM、128kB RAM内部高速存储器,更配置多功能外部总线接口FlexBus,方便扩展外部存储器以及I/O。其通讯模块包括2路CAN、5路UART、3路SPI通信模块,满足系统与外部通信及扩展需求。内置的实时时钟模块RTC,实现电梯主控系统记录故障发生时间,方便现场工程人员跟踪、解决故障。MK10N512的-40~105℃宽温度特性更是符合电梯控柜较为恶劣的使用环境。
总体来说,MK10N512是一款符合电梯控制系统要求的、高性能、低成本、可靠性高的微控制器。
2 MQX操作系统介绍
MQX是飞思卡尔半导体公司推出的应用于工业控制、汽车电子及消费电子的嵌入式实时操作系统(RTOS)。MQX采用微内核结构,具有标准的API接口、模块化架构,支持DOS文件系统、TCP/IP协议栈和USB协议栈等,在实时性、裁减性和移植性上都具有较理想的性能。
MQX为免费、开源操作系统,对飞思卡尔微控制器提供大量BSP、PSP包、范例应用支持,使用飞思卡尔微控制器的用户可免费使用MQX操作系统,特别适合于基于飞思卡尔微控制器的实时嵌入式系统的开发。
MQX包含嵌入式操作系统的基本功能和自有功能,如任务管理、中断管理、内存管理、时间管理和日志管理等。MQX以组件(component)的形式来实现其功能,MQX组件可以分为核心组件和可选组件,如图1[1]所示。
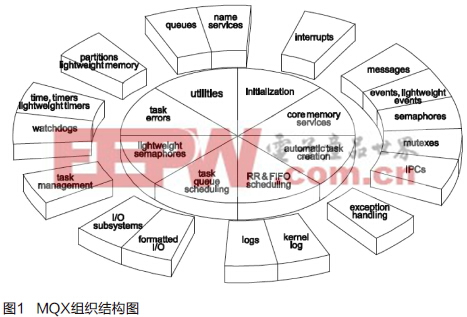
图1中心部分为核心组件,周围环绕部分为可选组件。核心组件包括初始化组件(Initialization)、RR(Round Robin轮询)&FIFO(先进先出)调度组件(Scheduling)、轻量级信号量(lightweight semaphores)、核心内存服务(Core memory services)等组件。可选组件包括任务管理(Task management)、格式化I/O(Formatted I/O)、中断管理(interrupts)等。
3 电梯控制系统组成
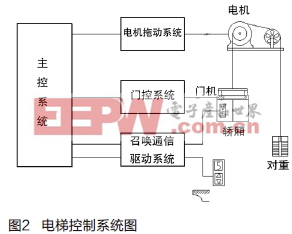
电梯控制系统由主控系统、召唤通信驱动系统、电机拖动系统以及门控系统组成,如图2所示。主控系统是电梯控制系统的核心,负责处理召唤,传输指令给电机拖动系统和门控系统,控制电梯运行和开关门,检测电梯故障等。召唤通信驱动系统负责把位于层站以及轿厢的召唤按钮信号传输给主控系统。电机拖动系统负责接收主控系统的运行指令,利用变频技术驱动电机运转。门控系统则负责接收主控系统的开关门指令,控制电梯自动开关门。电机拖动系统和门控系统同时也会把自身的运行状态信息反馈给主控系统。下面详细介绍主控系统软硬件设计。

单片机相关文章:单片机教程
linux相关文章:linux教程
单片机相关文章:单片机视频教程
单片机相关文章:单片机工作原理








评论