MEMS加速计校准提升工业应用中的精度

由于要求综合误差小于1%,我们可以快速回顾一下商用的MEMS传感器的指标。例如,一款领先加速计应具有如下指标:
灵敏度:+950mV/g到+1050mV/g,等同于5%
偏移:30mg(典型值),相当于3%(1g系统)
100mg(最大值),相当于10%(1g系统)
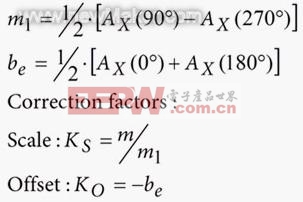
本例中,校准过程中必须首要考虑偏移和灵敏度,因为这两者都超出了1%的综合误差目标。
用于低g加速计的一个可靠的校准源是重力。使用重力的最简单方法是通过采用IEEE-STD-1293-1998中所给出的行业标准跌落测试。该跌落测试中,将一个变化范围为+1g的激励施加到被测器件上(DUT)。
该低激励水平不能用于满刻度量程小于20g的加速计的跌落测试,因为所加的校准激励等于或大于满量程的5%。在该量程之外,线性度、分辨率、噪声和其他与量程相关的特性将变得更有影响力,阻止所期望的精度的实现。为了校准,满刻度量程允许4点跌落测试,而非多点跌落测试,但多点测试可以用于线性度误差的计算。
这里,DUT是竖直的。DUT的X轴指向0°倾斜的水平轴。记录DUT的X轴输出。然后将DUT分别旋转90°,180°和270°,记录每点的X轴输出,故对应四个测量位置。
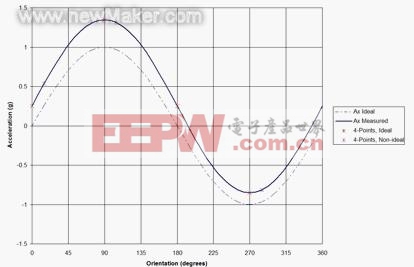
图4:四点跌落数据输出
由于追求“完美的”测量灵敏度既不实际也无法承受得起,而重要的是了解对每一个潜在误差(校准系统自身引入)的灵敏度如何。确定每一个误差的影响将会有助于降低违反关键性能准则的风险。
初始对齐角度绝对误差指的是起始位置误差。该起始位置误差将影响灵敏度,但不影响偏移。该影响可以被隔离而不影响其他的灵敏度,并且可以用下式描述:


误差类型与计算
相对对齐误差:该误差被定义为每一个测量步进间与理想的90°步进值之间的偏差。偏移校准将对该误差有较高的灵敏度。可以利用下列关系式来计算有对齐误差引入的偏移误差:

偏离轴向误差:偏离轴向误差指的是轴向相对于水平轴的变化总量。如果旋转设备完全垂直,则说明旋转轴是水平的。偏离轴向误差将影响灵敏度误差,其影响的方式与初始对齐的影响方法非常类似。
这里提醒要注意重力加速度变化,因为1g的外部激励未必是精确的1g。其影响恰恰是本地重力影响的2倍,另外还随着理论重力而变化,理论重力还受到纬度,海平面仰角,月亮-太阳重力波动以及附近的超大质量的影响。
机械振动:任何形式的振动都可以转换成为线形加速度,并为校准引入误差。采用花岗岩石块或空气隔离的桌面结构的机械隔离,将有助于降低误差,也可以采用数据滤波来消除振动引起的缺陷。
加速计灵敏度误差:影响加速计灵敏度特性的两个最重要的因素是电源电压和温度。在预期的电源和温度范围上,也可以采用四点跌落对加速计的行为进行特性化。线性逼近方案要求在每个参数的极限位置(最小和最大)上采集四点跌落数据。根据精度要求,这些数据可以被用来外推增量校正因数。如果发现非线性行为,可以增加更多的数据点,同时增加曲线拟合的阶数。 加速度计相关文章:加速度计原理







评论