6自由度机器人关节间隙误差分析及仿真

根据图6的坐标系建立机器人空间运动方程。根据边线12和边线34的偏移角度,假定虚拟关节旋转2度,其状态在运动过程中不发生变化。进行matlab动态仿真,仿真结果如图7。
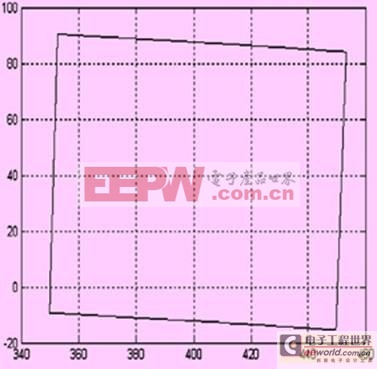
图7 仿真轨迹图
由图7的仿真图与图5的实际轨迹图对比可知,两者的轨迹走向基本一致;从图8的z向误差图可以得知,机械间隙导致z向有近0.1mm的变化。
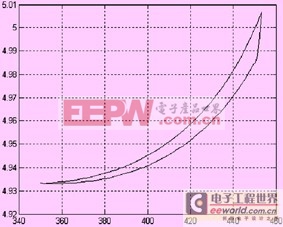
图8 轨迹z向误差图
由仿真分析结果可以断定,轨迹偏移主要由第2关节的轴承间隙引起。
从直观角度分析:
● 关节间隙导致机器人手臂有一定范围的滚翻,翻滚角度不变,随着手臂的展开偏移误差不断增大,导致边线倾斜。
● z向误差导致笔尖上下移动,线条轨迹不均匀。
结语
本方法将关节间隙等效为一个旋转一定角度的虚拟关节,在定性分析的同时,得到关节间隙对机器人精度的量化误差。
根据建立的误差方程求解机器人的逆解,部分关节轨迹为复数解。说明通过算法对于该误差的补偿很有限,机器人整体机械结构是决定机器人精度的关键因素。
对第2关节的轴承进行调整,轨迹偏移问题得到解决,可以绘制出规则的图形。










评论