6自由度机器人关节间隙误差分析及仿真

轨迹试验
现让机器人绘制一正方形,以验证机器人整体性能。
机器人末端固定一黑色油性笔,工作平台上放置一白色带灰色条纹瓷砖,见图4所示,以便于机器人在其上绘图。

图4 机器人轨迹试验图
机器人末端姿态采用zyz欧拉角表示,单位为度;坐标单位为毫米,在直角坐标空间对机器人末端执行器坐标设置如下:
第一点:坐标(350,0,5),姿态(0,180,0);
第二点:坐标(450,0,5),姿态(0,180,0);
第三点:坐标(450,100,5),姿态(0,180,0);
第四点:坐标(350,100,5),姿态(0,180,0);
第五点:坐标(350,0,5),姿态(0,180,0);
其中,第一点与第五点重合以保证绘制出一封闭正方形。
将直角空间坐标转换为关节空间坐标。机器人根据生成的关节坐标进行正方形绘制。各点位置以及绘制结果如图5所示。

图5 机器人绘制轨迹图
结果显示,机器人所绘制轨迹为一平形四边形,存在以下问题:
● 第1点与实际点偏移2mm;
● 边12和边34与期望轨迹夹角为2°;
● 边23和边41与期望轨迹有近1度偏移;
● 轨迹线条不均匀。
误差分析
机器人的结构设计与装配对整体的性能影响很大,在对程序、电器部分排查后,将误差的原因锁定在结构部分。
机器人第一关节电机安装在基座上,其余5个关节电机安装在同一个方向,见图2坐标系x0y0z0中x0负向,重量集中在该方向。
用手晃动每个关节,发现第二关节(见图2 坐标系x2y2z2)存在关节间隙,该间隙主要是轴承轴向间隙引起。初步判断机器人轨迹偏移可能是由于第2个关节的间隙产生,机器人手臂重量导致手臂向间隙方向有一定角度的滚翻,即绕x0轴逆时针转动一微小角度。
建模仿真
现增加一虚拟关节,等效机械手臂的滚翻。虚拟关节轴线垂直于第2关节的轴线方向,建立图6所示的相关机器人坐标系。
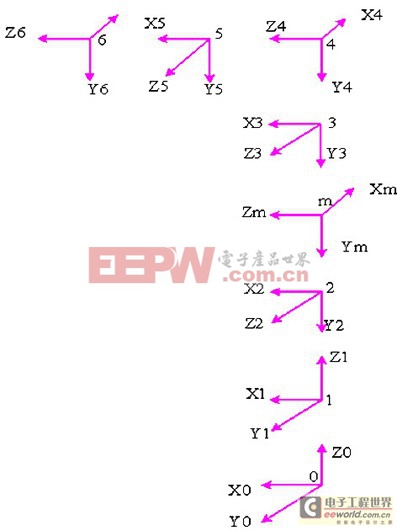
图6 增加虚拟关节机器人坐标系
其中:z0为基座原点,坐标系x2y2z2为机器人第2关节坐标系,坐标系xmymzm为增加的机器人虚拟关节坐标系,轴线zm垂直于关节2轴线z2。










评论