微创机器人从手结构的设计及运动学分析

 (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5)机器人末杆在及坐标系中的位姿矩阵为
 (6)
(6)其中

运动学方程逆解
根据正解结果,反求出机器人的各关节值。

工作空间分析
通过工作空间分析,按照实际的手术空间要求,得出机构的参数。
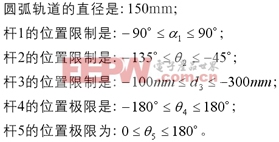
结合运动学分析及实际情况,设置机器人各杆的尺寸及极限位置如下:
结论
本文在分析“扭转打结法”打结过程的基础上,设计了一种新型的微创缝合打结机器人,并详细阐述了机器人的运动学解算过程,结合实际给出了设置机器人各杆的尺寸及极限位置的参数。
作者简介
尚凤玲 河南工业大学在读研究生。
参考文献
[1] howe d,yoky matsuoka.robotics for surgery[m].london:biomed, 1999.
[2] 王田苗等. 医疗外科机器人的研究开发与产业化前景[j].机器人, 2000, 22(7):897~901.
[3] mayer, hermann; gomez, faustino; wierstra, daan.a system for robotic heart surgery that learns to tie knots using recurrent neural networks[j]. advanced robotics,, 2008, 22:1521-1537(17).
[4] t.asao, s.yamaguchi, s.tsutsumi.experimental results and early clinical experience with an easy method for intracorporeal knot tying using a novel laparoscopic needleholder[j].surgical endoscopy, 2007,21:1553-1556.
[5] 岳龙旺.外壳手术机器人缝合打结研究[d].天津:天津大学,2006.

评论